Australia Chapter Antarctic and Southern Ocean Forum (ASOF)—
for Engineering Science and Technology
Reported by Mal Heron

ASOF was hosted by the OES Australia Chapter in Hobart, 14–17 August 2018. It was a single-track workshop co-sponsored inside IEEE by OES and GRSS, with CSIRO an external sponsor. Andreas Marouchos, who is Chair of the Polar Oceans OES Technology Committee, was the General Chair, ably assisted by Shona Lyden from CSIRO. Hobart is the smallest capital city, in Australia’s smallest state, with the biggest aggregation of oceanography and Antarctic science. Because Hobart is the supply base for Australia’s Antarctic activities, it has a large group of technology and engineering support personnel. The CSIRO research vessel RV Investigator was in port and the ice-breaker RSV Aurora Australis was preparing for the coming season in Antarctica. The ASOF program included a tour of the RV Investigator; but we did not manage to have the ice-breaker on the ice-breaker. The main signature of the Forum was the confluence of science and technology in the delegates and in the presentations. Perhaps it is the extreme conditions that people are working under in the Southern Ocean and the Antarctic Continent, or perhaps it is the close proximity of science and the supporting infrastructure in Hobart, but whatever the reason, the presentations in ASOF went all the way from lost moorings through to the highest aspirations for the planet. We heard about the science challenges as well as the issues in deploying and maintaining research instruments in this environment. Comment and discussions on presentations sometimes encroached on coffee break time. This came into focus when several feedback comments suggested that more time be allocated for structured discussion in future ASOFs. In the discussion at the end of the event there was a consensus that ASOF should be repeated in 2020, and the most significant take-home message was the success of the interactions between technologists, engineers and scientists. This was a most successful Forum in many respects.
|
|
 interacting with Celeste Fraser at the conference dinner. |
|
 |
Providence Chapter a Summary of the
Four Technical Meetings
Reported by Sandy Williams

James Michaelson, June 4, 2018
The first speaker was Dr. Jim Michaelson from Harvard Medical and Visiting Scientist at Woods Hole Oceanographic Institution. His topic was Micro CT Imaging, a technique most recently employed on clam shells and oceanic bird ears. The resolution of the CT scan is millimeters to microns, based upon a very intense and bright x-ray source. The application to surgery is where it has been most beneficial; permitting a surgeon removing a tumor to determine in minutes whether the excised material shows clean margins and if not the surgeon can extend the excision while the patient is still in the operating room, rather than returning a week later for a second procedure. Micro CT imaging was first employed in metallurgy but now has spread to other fields. The talk was presented at U. MASS. Dartmouth on June 4, 2018 at 6 PM. Because of the biological aspects of the subject it was advertised jointly with the Providence EMBS Chapter. The location between Woods Hole and Providence was convenient for all to attend.

Dr. Latha, June 25, 2018
On June 25, 2018, we had a guest from NIOT in Chennai, India—visiting Prof. Gopu Potty at URI. After Dr. Latha saw URI, she came with Gopu to Woods Hole Oceanographic Institution to speak with acousticians there and gave us a Chapter talk on Real Time Monitoring of Ocean Noise. The talk was very interesting. Dr. Latha started out by briefly summarizing the acoustics related activities her group at National Institute of Ocean Technology is involved in. This included
- Ambient noise measurements in shallow waters off the coast of India
- Noise measurements being carried out in the Arctic
- Geoacoustic inversion using ambient noise measurements made on Vertical Line Array in collaboration with URI.
- State of the art calibration facilities at NIOT in collaboration with NPL (UK), WTD (Germany) and VNIIFTRI (Russia).
- Humpback whale studies in shallow waters off Cochin, India in collaboration with WHOI.
The major topic covered in the talk was Real time monitoring of ocean ambient noise in Indian seas. She discussed the features of the autonomous passive acoustic measurement system with real time transmission, which has been developed for shallow water applications and operated in the open ocean at different sites off the Indian coast. The performance of the system in severe weather conditions, during multiple cyclones, was highlighted. Current efforts to develop a vector sensor array for passive noise monitoring were also discussed.
A lively discussion followed the talk on various topics covered in the talk especially related to the mooring design, telemetry aspects, and the marine mammal studies.
Milestone Event, September 6, 2018

On September 6, 2018 a Milestone event was held in Orleans, MA at the French Cable Station Museum. This was co-sponsored by the Providence Section and the Providence OES Chapter. Rene Garello, a principal speaker at the event, has already reported on it so it will not be commented upon here except to say it was a very interesting and rewarding event. The two sponsors each bought a bronze Milestone plaque, the OES plaque was in French, to copy one of the corresponding Milestone plaques in Brest, France at the other end of the 1889—1956 operating telegraph cable, first to connect Europe to the United States directly. Attendance was about 40 persons with about 10 IEEE members.
Mal Heron, September 7, 2018

Mal Heron, presented an OES Chapter talk on HF Radar in the Next Decade, held at Woods Hole Oceanographic Institution.
Distinguished Lecturer, Mal Heron from Jamestown University in Queensland, Australia, gave the OES Providence Chapter a presentation on HF Radar in the Next Decade. He provided both background on the discovery and development of HF Radar as used for measuring ocean current remotely and the new ramifications of the use of Radar, even in the X-band, for surface current and waves. We benefited in his availability in Woods Hole, MA due to his position on OES ExCom, which held its late summer meeting on Cape Cod. This talk was on September 7, 2018 and was attended by 11 IEEE members and 3 Guests.
 |
Jake Lacourse is explaining the Lean Manufacturing philosophy used at Onset Computer, Inc. in their selection of product, design, testing, and manufacturing. The Chapter technical meeting at the factory in Bourne, MA on September 27, 2018 was followed by pizza and informal discussion with every part of the facility available for inspection. There were 6 IEEE members and 11 Guests. |
Onset Computing, Inc., September 27, 2018
In the interest of also representing manufacturing and industry in Chapter talks, a technical meeting was held on September 27, 2018 at Onset Computer, Inc. in the Bourne, MA factory. Jake Lacourse, Director of Hardware Engineering, and Jamie Pearce, VP of Marketing and Business Development, gave a series of presentations as well as a factory tour. Onset has a staff of 140 and all work, from product definition to assembly and shipping is done in this facility. It was a very interesting glimpse into an essential aspect of engineering. My personal interest in Onset arose from their data loggers, the Tattletale family, that I have used in my underwater instrumentation since their earliest days in about 1981.
Malaysia Chapter—Meeting Report and Activities
Reported by Rosmiwati Mohd Mokhtar, Mohd Rizal Arshad and Zainah Md Zain
Chapter Meeting
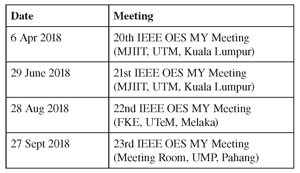
As of October 2018, the IEEE OES Malaysia Chapter has conducted four chapter meetings for the year.
 |
 |
| Photo taken during one of the Chapter Meetin. |
Technical Workshop on Underwater Acoustics Sensor Design
On 27th and 28th August 2018, the IEEE OES Malaysia Chapter organized a two day workshop on underwater acoustics sensor design. The workshop was jointly organized by the Center for Robotics & Industrial Automation (CeRIA), Faculty of Electrical Engineering, Universiti Teknikal Malaysia Melaka (UTeM). The speaker of the workshop was Dr. Mohd Ikhwan Hadi Yaacob from Universiti Pendidikan Sultan Idris (UPSI), Tanjung Malim, Perak. The aim of the workshop was to give an overview and exposure of underwater acoustics sensor to researchers. During the event, participants were given opportunity to design a simple acoustics sensor for underwater application.
On the first day, the workshop focused on underwater acoustics basics and essentials, underwater acoustics sensor architecture, material selection and design consideration. It was also included with hands-on design of a simple underwater acoustics sensor. More experimental work was conducted on the second day. The designed underwater acoustics sensor was tested in the big tank, which was available in the lab. The conducted workshop has indeed promoted the research related to this underwater field and that has also provided the participants an opportunity to experience designing an acoustics sensor for underwater application. This has improved in terms of their development skills in the associated technologies.
 |
 |
| Dr. Ikhwan while conducting the talk. | Experimental test in the lab tank. |
In conjunction with the workshop, the visit to underwater technology research lab at the Universiti Teknikal Malaysia Melaka was also made. The participants had the opportunity to see the ocean engineering research activities that are conducted at the university. This activity has allowed the members to share ideas and knowledge and to discuss on further direction and future expectation of ocean engineering and technology in Malaysia.
 |
| NUSYS’18 committees with the keynote speakers. |
National Seminar on Underwater System Technology 2018
The 10th National Technical Seminar on Underwater System Technology 2018 (NUSYS’18) was organized by the Faculty of Electrical & Electronics Engineering, Universiti Malaysia Pahang (UMP) on the 26–27 September 2018 at the UMP Library, Pekan Campus. With a theme “Deeper Discoveries,” NUSYS’18 was jointly organized by IEEE OES Malaysia Chapter, Malaysian Society for Automatic Control Engineers (MACE), and Institute of Engineer Malaysia (IEM) Marine Engineering and Naval Architecture Technical Division (MNATD). The objectives of the seminar were;
- To accommodate a medium to discuss wide range of underwater system technology between universities and industries.
- To disseminate the latest technology in the field of underwater engineering.
- To provide an opportunity for researchers to present their paper in electrical & electronics engineering and underwater system technology area.
NUSYS’18 was officiated by the Deputy Dean (Academic) Faculty of Electrical and Electronics Engineering, UMP, Assoc. Prof. Dr. Hamdan Daniyal. 57 papers were presented by authors during the technical sessions. In addition, 3 distinguish speakers delivered their keynotes during the event. Those were,
- Assoc. Prof. Dr. Aidy @ Mohamed Shawal M. Muslim, the Director of Institute of Oceanography and Environment (INOS), Universiti Malaysia Terengganu—Exploring Application of Remote Sensing in Underwater Mapping.
- Mr. Mirza Iryawan Hamza, Technical Director of Temasek Hidroteknik Sdn. Bhd. (Survey Division) & Temasek Allied Engineering (Instrumentation Division)—Autonomous Underwater Vehicle (AUV) for Coastal Hydrographic Surveys.
- Assoc. Prof. Dr. Mohd Farid Muhamad Said, Senior Lecturer at Dept. of Aeronautic, Automotive & Ocean Engineering, School of Mechanical Engineering, Faculty of Engineering, Universiti Teknologi Malaysia—Development of an ROV: Antarctic Expedition and Underwater Observation for Industry Application.
 |
 |
 |
| Assoc. Prof. Dr. Aidy @ Mohamed Shawal M. Muslim. |
Mr. Mirza Iryawan Hamza. | Assoc. Prof. Dr. Mohd Farid Muhamad Said. |
The OES membership drive was also conducted during the event. This is made to give an overview about the IEEE OES Chapter with the aim that more people will join the Chapter in the future.
Singapore Chapter—Meeting Report and Activities
Reported by Hari Vishnu and Venugopalan Pallayil
IEEE OES Singapore has been active this year in organizing many technical talks for its members. On the 1st of February, Eric de Trétaigne from Alseamar delivered a talk touching upon aspects of the SeaExplorer Glider system.
After our flagship underwater robotics event (The Singapore AUV challenge), we followed it up with a talk later in March by Dr. James Bellingham. Dr. Bellingham is the founding director of Center of marine robotics at Woods Hole Oceanographic Institution and the co-founder of Bluefin Robotics. His talk dealt with the current state of the art in autonomous marine systems, and the future of research in this field. The talk was titled “Ocean Science in the Age of Marine Robots,” and saw quite a bit of audience engagement and discussion on marine robotics.
 |
 |
| Dr. Bellingham in an engaging discussion on marine robotics at the Tropical Marine Science Institute, National University of Singapore. |
Dr. Dajun Tang’s talk on “Acoustic Transmission Loss: a practical consideration” in progress. |
Dr. Christian de Moustier, who is the founder of 10 dBx LLC, and also the President of the IEEE Oceanic Engineering Society, visited Singapore in May 2018 and a technical talk by him was organised by the local Chapter. His talk focused on advanced post-processing of sonar data. The talk was titled “In-situ beam pattern estimation for seafloor acoustic backscatter measurements.”
 |
| Dr. Christian de Moustier, President of IEEE OES, with the attendees of his talk at National University of Singapore. |
Dr. Dajun Tang gave a talk on “Transmission Loss: a practical consideration” on the 28th of September. He is a Principal Senior Oceanographer at Applied Physics Laboratory, University of Washington. Dajun’s talk covered the definition, measurement, modeling, and application of underwater transmission loss through real data collected in some recently conducted experiments, and touched upon practicalities associated with predicting and measuring transmission loss. The talk was followed by an involved technical discussion along with a networking barbeque dinner held at the premises of the Acoustic Research Laboratory in the National University of Singapore.
In summary, we have had a range of talks focusing mainly on acoustics and marine robotics this year. We plan to round up this year with an annual year-end workshop complete with technical talks, mostly focusing around marine biology and bio-acoustics. We expect strong participation from students, industry and academia. The details of this event will be reported in a later BEACON article.
Seattle Chapter Technical Meetings
Reported by John Hager, Secretary, Seattle Chapter
USCGC Healy Tour
The monthly meeting for January, 2018, was a tour of the U.S. Coast Guard’s newest icebreaker, the USCGC Healy (WAGB-20), launched in 1997. At an overall length of 420 feet and beam of 82 feet the 16,000LT displacement ship can break 3-1/2 foot thick ice at a speed of 3 knots and ice up to 8 feet thick by backing and ramming. The vessel was designed to also conduct extensive science missions in the arctic. The ship features more than 4,200 square feet of scientific laboratory space, an array of oceanographic handling gear including multiple winches loaded with mechanical-optical cable, and a suite of sensor systems. The vessel can accommodate up to 50 scientists. The tour was conducted by two Ensigns, recent graduates of the U.S. Coast Guard Academy, each now with arctic cruise experience. These two ladies lead the group from the bridge, through the length of the ship, down to the engine level, providing a wealth of technical information at each station. The stations included not only the piloting, navigation, logistics, mechanical, electrical, and propulsion, but also the laboratory rooms and equipment, the high-bay hanger for research vans, equipment, and vehicles, and the gargantuan oceanographic winches (one loaded with 30,000 feet of mechanical-optical cable) on the lowest deck. Perhaps most impressive, beyond the deep knowledge of the ship’s specifications and capabilities, was the enthusiasm displayed by the two Ensigns. They regaled the group with stories of their physical training (damage control, fire-fighting, scuba diving), and their arctic cruise experiences piloting the ship through ice (and getting stuck, briefly), and supporting arctic oceanographic research. The education, training, experience, and eagerness which they displayed was impressive and inspirational.
 |
 |
 |
| U.S. Coast Guard Cutter HEALY. | Tour welcome and orientation. | Healy Control Center. |
 |
| Business wrap-up. |
 |
| Let the presentation begin. |
Heave and Motion compensation
At the monthly meeting for February, 2018, Mr. Joseph Sabbia from Bosch Rexroth Corp. discussed “Calm Waters-Wait or Create? Active Heave and Motion Compensation.” The effects of wave motion can have significant safety and cost impacts on marine operations when handling heavy loads and sensitive oceanographic equipment. Maximizing up time can be achieved by using heave and motion compensating technologies which counter the wave actions. Active compensation solutions have been implemented in many aspects of marine operations from roll compensated helicopter landing platforms to deep water handling systems to 3 degree of freedom compensated platforms. Mr. Sabbia discussed his extensive work at Bosch Rexroth in the area of motion compensation where they have been able to deliver both hydraulic and electric driven compensation solutions from one to six degrees of freedom. He presented an overview of application examples for heave and motion compensated machines that Bosch Rexroth has delivered to the market and discussed the technology behind these systems including the differences between passive heave compensation and active heave compensation. Energy storage and recovery also was discussed along with state-of-the-art systems for multi-axis compensation.
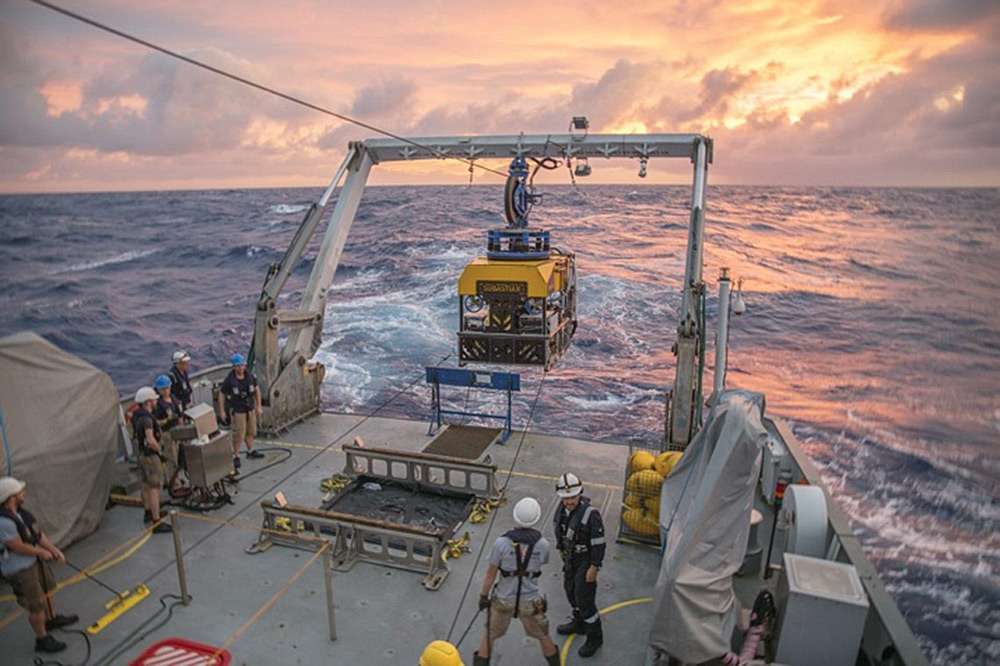
Schmidt Ocean Institute’s ROV SuBastian
At the monthly meeting for March, 2018, Mr. Eric King from Schmidt Ocean Institute (SOI) discussed the rapid development and completion of the 4,000 m ROV SuBastian: “18 Months from Concept to Mission Ready.” In 2016 SOI added a pivotal ocean science resource to its suite of systems offered aboard the foundation’s 275 foot privately owned research vessel Falkor. SOI recognized the need for a dedicated remotely operated vehicle that could live aboard the ship. This vehicle, with some of the same capabilities as NSF’s ROV Jason and CSSF’s ROV ROPOS, would become a primary robotic tool available to scientists and researchers during collaborative expeditions. As a no-cost platform to the greater community of users, SOI is committed to continuously improve the vehicle’s specifications and enhance its plug-and-play features. Mr. King discussed how the project developed from concept to operational readiness, including the back story of SOI’s initial initiative to build an 11,000 m hybrid ROV. He also highlighted several recent missions where ROV SuBastian has been used off of Guam, the Republic of Kiribati, and the Kingdom of Tonga, along with upcoming 2018 projects off the Pacific Northwest coast in the vicinity of Hydrate Ridge. Of significance is the potential for low cost at-sea support of small oceanographic research projects through SOI. The Schmidt Ocean Institute is a 501(c)(3) private non-profit operating foundation established to advance oceanographic research, discovery, and knowledge, and catalyze sharing of information about the oceans.
 |
 |
| ROV SuBastian. | Q & A with Mr. Eric King. |
 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.