
The Student Poster Competition (SPC) is a flagship event of the MTS/OES OCEANS conferences in which students (both undergraduate and graduate) from colleges and universities around the world participate. Col. Norman Miller had created and implemented the first SPC in 1989 during the OCEANS conference in Seattle, Washington, and it has been a feature of OCEANS conferences ever since. During each conference, typically about twenty students are selected from the pool of aspiring applicants, based on their submitted abstracts, to present a poster describing their work. The selected students’ travel, accommodation and conference registration are fully supported by the conference. In addition, monetary prizes are also awarded to the top three best presenters among the selected participants.
The first of this year’s SPC was held during OCEANS 2019 Marseille at the Marseille Chanot Exhibition and Convention Centre from the 17th to the 20th of June. The SPC program was funded by a grant from the Office of Naval Research Global (ONR-G), and we offer our sincere gratitude for their continued support. Preparations in the run-up to the event were ably managed by the SPC chair on the local organizing committee, Gaultier Real, with minimal assistance from me and Liesl Hotaling (MTS SPC Chair, who unfortunately could not attend). Out of the 59 applicants (from 16 different countries) that chose to submit their abstracts for consideration for the SPC, 18 students were chosen to present their work at the event.



Following a mandatory short oral presentation to the judges on Monday morning, the students put up their posters at the designated slots in the Exhibition Hall and were eager to pitch their research to conference attendees. They enthusiastically described their work to the judges and the other delegates that visited their posters. We had a total of 11 volunteers that offered to serve as judges, some of whom were contestants themselves in prior editions of the SPC. Given the high standards in the work presented by the participants and the breadth of topics covered, judging seemed to be a rather difficult task, spanning over two days and numerous hours of very intensive assessment. Our gratitude and appreciation goes out once again to the judges.
The award ceremony took place during the conference gala banquet at the Casa Delauze, Marseille on Wednesday June 19th. Each participating student was awarded a Certificate of Attendance, and the judges’ tireless efforts were acknowledged by presenting each of them a Certificate of Appreciation. The three top-ranked posters were announced and prizes were awarded. The awards were handed out to the winners by Dr. Vincent Rigaud, Director of Underwater Systems Unit, Ifremer, the organization which generously sponsored the monetary awards.
The full list of participants (including the prize winners) together with their affiliation, poster title and an abstract of their poster is given below.
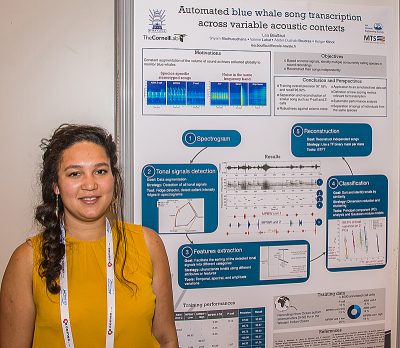
First Prize and Norman Miller Award (Certificate and $3000 prize)
Léa Bouffaut, Naval Academy Research Institute, France
Abstract—The size of sound archives collected globally by the community to monitor cetaceans, including blue whales, is rapidly increasing. Analyzing these vast amounts of data efficiently requires reliable automated detection algorithms. Typically these algorithms focus on a specific call type produced by a single species. We developed an automatic transcription algorithm which can identify multiple concurrently calling species in sound recordings. The algorithm was tested on data containing series of calls (songs) of Madagascar pygmy blue whales and series of the 27Hz tonal unit named ”P-call”. The algorithm is based on pattern recognition of tonal calls in the time-frequency domain where (1) segmentation is realized by detection of tonal signals, (2) features are extracted from their time-frequency-amplitude information, and (3) classification is realized by clustering. The classified tonal signals are then used to reconstruct, separately, the underlying songs. We successfully trained and tested the algorithm on data (>4000 annotated calls) in the Western Indian Ocean and achieved an overall precision of 97.2% and a recall of 96.9%, respectively.
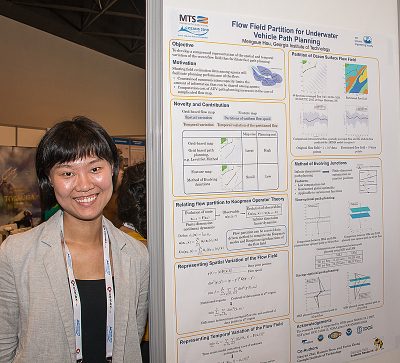
Second Prize (Certificate and $2000 prize)
Mengxue Hou, Georgia Institute of Technology, USA
Abstract—In this paper, we present a flow field partition method that extracts the key features, which are the spatial and temporal variation of the flow field. The partition method is developed based on K-means algorithm. In the case where the temporal pattern of the flow field contains only a periodic tidal component, we propose an algorithm that partitions the flow field into static clusters of piece-wise constant flow, by performing K- means clustering over the time-averaged flow field. Then the method is extended to partitioning the flow field into clusters of uniform time-varying flow, by fitting the spatially averaged flow in each static partitioned region to a parametric flow model. Simulation results of partitioning both a simulated jet flow field, as well as the ocean surface flow data into time-invariant and time-varying uniform flow are presented to demonstrate that the proposed method can represent the true flow field with significantly less amount of data. Result of using Method of Evolving Junctions to plan the time-optimal path in the partitioned flow field is also presented to demonstrate that the proposed flow partitioning method can be applied to facilitate path planning, and can reduce the path planning computational cost.
Third Prize (Certificate and $1000 prize)
Wendy Snyder, University of Rhode Island, USA
Abstract—Seaglider is a buoyancy driven autonomous under- water vehicle (AUV) primarily used as a platform for oceanographic measurements of salinity, temperature, and oxygen, where precise localization is not crucial. A recent experiment tracked a Seaglider, instrumented with an attitude and heading reference system (AHRS), on an acoustic tracking range in an effort to quantify the accuracy of the Seaglider’s two localization solutions and determine the effects of incorporating additional inertial measurements into the solution. Preliminary analysis of results has shown the Seaglider’s glideslope model (GSM) is more accurate and reliable than the hydrodynamic model (HDM) during typical flight dynamics. Errors in the GSM solution did not exhibit a clear drift behavior but remained on average within 22 m of the ground truth acoustic track over dives with a maximum depth of 90 to 125 m. Errors in the HDM solution exhibited linear growth until the apogee point of the dive when errors began to linearly reduce. On average the error increased at a rate of about 5 m/min between the surface and maximum dive depth, with maximum errors in excess of 100 m during dives with a maximum depth of 90 m. The substitution of attitude estimates from the AHRS into the localization models provided similar but less consistent results with slightly higher errors.
Alfredo Bayuelo Sierra, National University of Colombia, Colombia
Abstract—Simultaneous Localization and Mapping (SLAM) is a desired capability for an autonomous vehicle. SLAM is the process used to construct a representation map of an unknown surrounding world, localize in it, and use this map to navigate through it. For aquatic environments, this is an even harder challenge since it is a non-structured and highly dynamical environment in which classical landmark-based approaches to the SLAM problem are not suitable. In this paper, we use previously developed representations of aquatic environments based on Dynamical Systems and Augmented Bathymetry to construct a preliminary solution to the SLAM problem. A simple motion model is combined with physicochemical readings of the water to find candidate locations. Our ideas were preliminarily tested in a dataset acquired in the Lake Nighthorse, CO, obtaining promising results in the new strategy.
Filippo Campagnaro, University of Padova, Italy
Abstract—Grounding of ships is as of today one of the most common causes of maritime accidents. An effective anti- grounding service, where updated bathymetry data is sent in real time to a ship can improve maritime and human safety. The bathymetry data is collected by an autonomous surface vessel equipped with a multi-beam sonar while the ship is approaching the port. This data is then conveyed immediately to the ship, by employing a wireless communication link. In this paper, a study on the enabling technologies for an effective anti-grounding service is provided, with special focus on the wireless communication devices to employ for the real-time bathymetry data transmission.
Matias Carandell, Universitat Politecnica de Catalunya, Spain
Abstract—A Kinetic Energy Harvester (KEH) device under design for drifter applications has been tested at real sea conditions in a controlled area. The KEH consists on a pendulum system capable to transform the oscillations of the waves into rotation which will be converted into electrical energy thanks to a dc micro generator. The KEH has been placed inside a drifter. First, the motion of the drifter was obtained through an embedded Inertial Measurement Unit, showing natural pendulum frequency of 1.5 Hz. Simulations with OrcaFlex validate the experimental results. Then, the rotation speed of the micro generator was measured. Results show a prevalence of speed of 1400 rpm, which should lead to a potential power output of 2 mW.
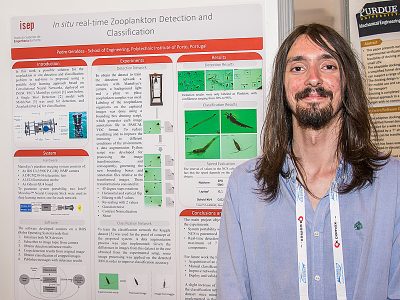
Pedro Geraldes, ISEP, Portugal
Abstract—Zooplankton plays a key-role on Earth’s ecosystem, emerging in the oceans and rivers in great quantities and diversity, making it an important and rather common topic on scientific studies. Given the numbers of different species it is not only necessary to study their numbers but also their classification. In this paper a possible solution for the zooplankton in situ detection and classification problem in real- time is proposed using a portable deep learning approach based on Convolutional Neural Networks deployed on INESC TEC’s MarinEye system. For detection a Single Shot Detection model with MobileNet was used, and ZooplanktoNet for classification. System portability is guaranteed with the use of MovidiusTM Neural Compute Stick as the deep learning motor.
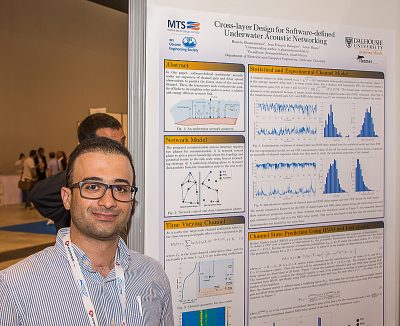
Hossein Ghannadrezaii, Dalhousie University, Canada
Abstract—In this paper, a network relying on software-defined underwater acoustic nodes is proposed: by receiving a periodic beacon signal from the sink node, each node in a cluster obtains a prediction about the communication quality of the potential links to its one-hop neighbors as well as to the available relay nodes within the cluster. A hidden Markov process is used to predict the next state of the channels, using the probability distribution of the channel amplitude and delay spread from previous observations. Each transmitting node evaluates the quality of links to its next hop neighbor relay nodes. Accordingly, a normalized weight representing the channel quality is assigned to each link. The channel gain and its delay spread are the two metrics that are used to define the channel quality. To evaluate the network performance in realistic conditions, the output of a statistical model combined with the Bellhop ray tracing software is compared to experimental data. Using the channel quality, each transmitter node in the network selects its next hop optimum relay node. This scheme minimizes the number of transmitted control packets and also reduces the re-transmission of data packets, by predicting the channel status rather than exchanging an excessive number of control packets which typically convey expired channel state information. Minimizing the overhead and selecting the optimum channel saves on the energy per bit consumption while maintaining high packet delivery ratio and low latency.
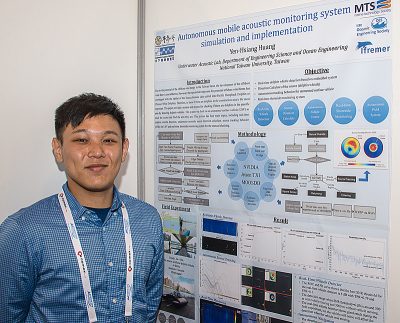
Yen-Hsiang Huang, National Taiwan University, Taiwan
Abstract—Due to the potential of the offshore wind energy in the Taiwan Strait, the development of the offshore wind farm is cost- effective. However, the expected develop area for potential offshore wind farms has overlapped with the habitat of the Sousa chinensis (also called Indo-Pacific Humpback Dolphin or Chinese White Dolphin). Therefore, to know if there are dolphins in the construction area is the most important. This paper provides a process for checking if there are dolphins in the specific area and using an unmanned surface vehicle to track the source and find the area they are. This process has four main topics, including real-time dolphin whistle detection, underwater acoustic source direction calculate, source tracking behavior (STB) and real-time shoreside monitoring system of the surface vehicle. The whole system was developed using the open source middleware MOOS-IvP and testing in the embedded system (NVIDIA Jetson TX1). The whole system was implemented and successfully tested in the field experiment using artificial dolphin sound.
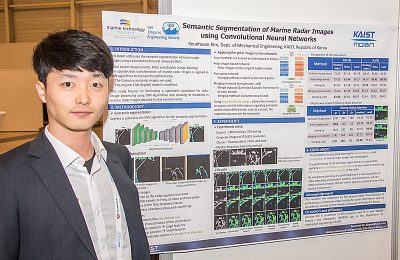
Keunhwan Kim, KAIST, Republic of Korea
Abstract—Marine radar is essential for ship navigation and control. Several studies exist that are focused on eliminating unwanted noise signals to properly detect targets in radar images. However, in general, radar image processing techniques are sensitive to radar sensor specifications and operating conditions, and ad-hoc image preprocessing steps are required to adjust many parameters to achieve an overall satisfactory performance. This paper addresses the semantic segmentation of marine radar images using a convolutional neural network (CNN). SegNet is utilized as the CNN algorithm for the semantic segmentation. In order to improve the performance of the CNN considering the measurement characteristics of the radar, Cartesian coordinate system based images are transformed into polar coordinate systems. The Cartesian and polar images are used and the original SegNet model is modified to train the network in a variety of methods. The results show the feasibility of using a deep learning network to achieve effective and robust semantic segmentation in several different sets of marine radar images.
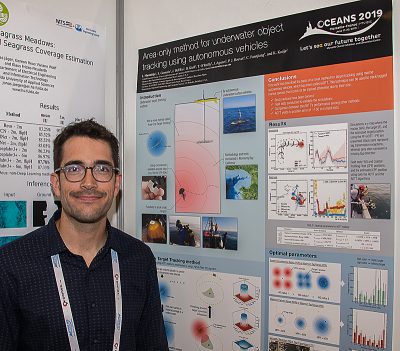
Ivan Masmitja, Universitat Politècnica de Catalunya, Spain
Abstract—The use of autonomous underwater vehicles for ocean research has increased as they have a better cost-to-performance ratio than crewed oceanographic vessels. For example, autonomous surface vehicles (e.g. a Wave Glider) can be used to localise and track targets even in the deep-sea. While other researchers have focused on target tracking using acoustic modems, none explored up to date the area-only target tracking methodology. Here we present such a novel method with commercially available acoustic tags, thereby reducing the costs and complexity over other tracking systems. Moreover, this method can be used to track small targets (e.g., jellyfish) due to the tag’s small size. The methodology behind the area-only technique is shown, and results from field tests conducted in Monterey Bay are also presented.
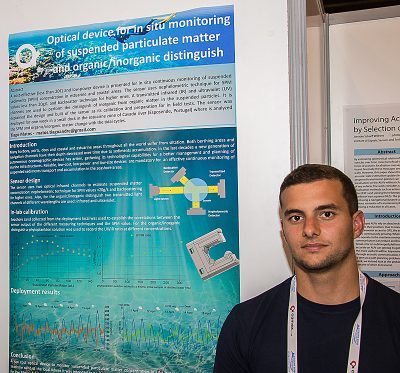
Tiago Matos, University of Minho, Portugal
Abstract—A cost-effective (less than 20€) and low-power device is present for in situ continuous monitoring of suspended sediments (SPM) concentration in estuarine and coastal areas. The sensor uses nephelometric technique for SPM values less than 20g/L and backscatter technique for higher ones. A transmitted infrared (IR) and ultraviolet (UV) channels are used to perform the distinguish of inorganic from organic matter in the suspended particles. It is explained the design and built of the sensor as its calibration and preparation for in field tests. The sensor was deployed for one week in a small dock in the estuarine zone of Cavado river (Esposende, Portugal) where is analyzed the SPM and organic/inorganic matter change with the tidal cycles.
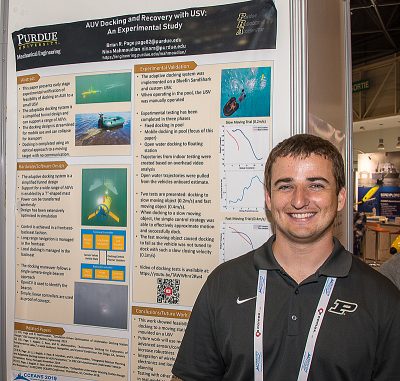
Brian Page, Purdue University, USA
Abstract—This paper presents an early stage work on docking and recovery of Autonomous Surface Vehicles (AUVs) with Unmanned Surface Vehicles (USVs). The docking system is collapsible and adaptable to a wide range of AUVs. Control of the docking maneuver is completed based on a one camera, one light approach using a frontseat-backseat control setup. In this scenario, the vehicle navigates under frontseat control to within visual range of the dock. The backseat controller then takes over and performs terminal homing. Pool and open water testing was completed with docking to a small dinghy in both a manned and unmanned configuration. Two experimental docking attempts are presented, one docking to a slow moving target and another docking to a quickly moving target. The empirical results show that docking and recovery of an AUV from a USV while underway is feasible.
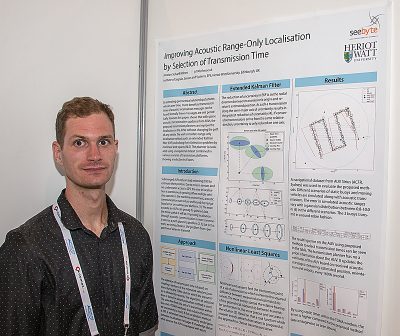
Jonatan Scharff Willners, Heriot-Watt University, United Kingdom
Abstract—This work looks at when to transmit localisation messages in the scenario where an Autonomous Surface Vehicle (ASV) has a planned path and can estimate a submerged AUV’s positions based on acoustic updates. Acoustic localisation messages are in general transmitted periodically, but by estimating the movement of the involved vehicles, messages can be transmitted at a time when the geometrical relationship between vehicles should reduce the receiving vehicles error and uncertainty to the greatest extent. This paper looks at how selection of Time of Launch (ToL) within a Time-Division Multiple Access slot can reduce this based on history of transmission and the estimated geometrical relationship between vehicles over time. The method to select ToL is dependent on the localisation method, we look at this from the perspective of Extended Kalman Filter and to solve the trilateration problem using Non-linear Least Squares. The benefit of proposed approach is in scenarios where the operating vehicles have their own objectives, and cannot adapt their path to achieve a more beneficial transmission position. The proposed approach shows a reduction of error and uncertainty, while using a navigational dataset collected by an Autonomous Underwater Vehicle when compared to other methods of which transmission times are selected.
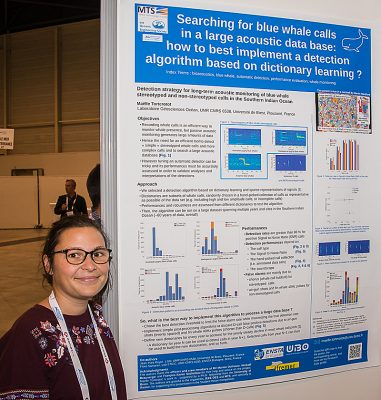
Maëlle Torterotot, Institut Universitaire Européen de la Mer, France
Abstract—The most common approach to monitor mysticete acoustic presence is to detect and count their calls in audio records. To implement this method on large datasets, polyvalent and robust automated call detectors are required. Evaluating their performance is essential, to design a detection strategy adapted to study the available datasets. This assessment then enables accurate post-analyses and comparisons of multiple independent surveys. In this paper, we present the performance of a detector based on dictionaries and sparse representation of the signal to detect blue whale stereotyped and non-stereotyped vocalizations (D-calls) in a large acoustic database with multiple sites and years of recordings in the southern Indian Ocean. Results show that recall increases with the SNR (Sound to Noise Ratio) and reaches 90% for positive SNR stereotyped calls and between 80% and 90% for high SNR D-calls. A detailed analysis of the influence of dictionary composition, SNR of the calls, manual ground truth as well as interference types and abundance, on the performance variability is presented. Eventually, a detection strategy for long term acoustic monitoring is defined.
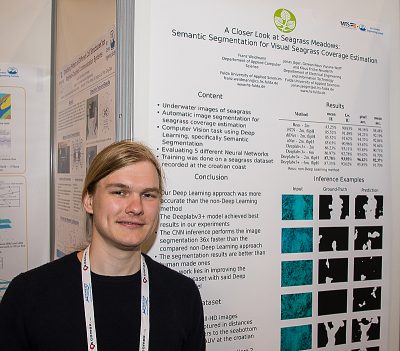
Franz Weidmann, Fulda University of Applied Sciences, Germany
Abstract—Underwater imaging enables marine researchers to collect large datasets of seagrass images. These images can be used to monitor the health state of underwater meadows by estimating the area that is covered by seagrass and how this area changes over time. Since the manual analysis of such images is slow and error-prone, we follow the path of deep learning for automatic image analysis. Our contribution is the investigation of deep semantic segmentation for the specific task of seagrass coverage estimation. We evaluated multiple Deep Neural Network Architectures including the DeepLabv3Plus Network which performs best, with a mean intersection over union of 87.78%. The qualitative results in our experiments indicate that the Deep Learning approach is not only more accurate than a human but also multiple times faster in annotating underwater meadows. Our code is available on GitHub: https://enviewfulda.github.io/LookingForSeagrassSemanticSegmentation/
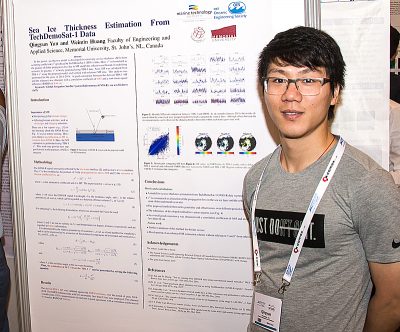
Qingyun Yan, Memorial University of Newfoundland, Canada
Abstract—In this paper, an effective model is developed for retrieving sea ice thickness (SIT) from scattering coefficient (σ0) produced with TechDemoSat-1 (TDS-1) data. Here, σ0 is formulated as the product of the propagation loss due to SIT and the reflection coefficient of underlying seawater. In application, σ0 at specular point was firstly generated based on radar equation using TDS-1 data. Next, SIT was calculated from TDS-1 σ0 using the proposed model, and verified with reference SIT data obtained by the Soil Moisture Ocean Salinity (SMOS) satellite. The data used here were from measurements over the year of 2015. Comparison results showed a good consistency between the derived and reference SIT, with a correlation coefficient of 0.90 and a root mean square difference of 8.68 cm, which demonstrates the potential of developed model and the utility of TDS-1 data for SIT retrieval.
 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.