
A Flagship event of any MTS/IEEE OCEANS conference is the Student Poster Competition (SPC) in which a selection of students are invited, on the basis of their abstract submission, to attend the conference at no expense to them, and present a poster of their work. They also have the opportunity to win a monetary prize offered to the three posters judged to be the best, by an independent panel. The latest occurrence of the SPC was held during OCEANS 2018 Charleston on the 23th and 24th of October, 2018.
The SPC program was funded by grants from the Office of Naval Research (ONR) and National Oceanic and Atmospheric Administration (NOAA), and to them we offer our sincere appreciation; without their support the competition could not go ahead. For this edition of the SPC, 18 students were selected to attend in Charleston out of more than a hundred submissions from around the world. Selecting the best abstracts is not easy given the quality of the abstracts submitted, but eventually what were judged to be the best 18 were selected.
 |
The posters were on display in the Exhibition Hall of the Charleston Area Conference Centre for two days. Like previous Student Poster Competitions, the posters on display described the work carried out by the students and, as is rapidly becoming the norm, were of a very high standard. The posters were judged by a team of judges who read and discussed the work with every student; a very difficult, time consuming and intensive task over a two-day period and our thanks and appreciation goes out once again to the judges. The students enthusiastically described their work to the judges and to any delegates who dropped by over the two day period.
 |
|
 |
|
| Discussions during the poster sessions. |
Each participating student was awarded a Certificate of Attendance and the top three posters were awarded a specially designed trophy and a monetary prize. The Award Ceremony took place during lunchtime in the Convention Centre on Thursday, October 25th. The ceremony began with a few words from Liesl Hotaling, the MTS SPC Chair and Local Organizing Committee SPC Chair, followed by a presentation of awards by John Watson, the OES SPC Chair. The winner of the SPC is awarded the Norman Miller Prize. Many will know that Col. Miller inaugurated the first SPC in 1989 and enthusiastically championed it until he passed away in July 2015. The First Prize is named in his honour.
The full list of 18 participants and prize winners together with their affiliation, poster title and an abstract of their poster is given below.
First Prize and Norman Miller Award (Trophy, certificate and $3000 prize)
Joshua Mangelson, University of Michigan, USA, Communication Constrained Trajectory Alignment for Multi-Agent Inspection via Linear Programming.
 |
 |
Abstract—This paper reports on a system for estimating the alignment between robotic trajectories under constrained communications. Multi-agent collaborative inspection and navigation tasks depend on the ability to determine an alignment between robotic trajectories or maps. The properties of the underwater environment make determining such an alignment difficult because of extreme limitations on communication and the lack of absolute position measurements such as GPS. In this paper, we propose a method that takes advantage of convex relaxation techniques to determine an alignment between robotic trajectories based on sparse observations of a low-dimensional underlying feature space. We use a linear approximation of the l2-norm to approximately enforce that the estimated transformation is an element of SO(2). Because the relaxed optimization problem is linear, we can take advantage of existing convex optimization libraries, which do not require an initial estimate of relative pose. In addition, because the proposed method does not need to perform data association, we can align trajectories using low-dimensional feature vectors and can thus decrease the amount of data that must be transferred between agents by several orders of magnitude when compared to image feature descriptors such as SIFT and SURF. We evaluate the proposed method on simulated datasets and apply it to real-world data collected during autonomous ship hull inspection field trials.
Second Prize (Trophy, certificate and $2000 prize)
Dheepak Nand Kishore Khatri, North Carolina State University, USA, Investigation of a Novel Approach for Ocean Current Power Generation: The Inclined-Axis Coaxial Turbine.
 |
 |
Abstract—The feasibility and performance of a tethered coaxial system is investigated to understand changes in power production with perturbation. Our results suggest that the power extracted from an ocean current by a tethered coaxial system is insensitive to attitude perturbation within a range of inclination to the flow. Flow domains and design parameters have been optimized to come up with a wide range of operating parameters resulting in a higher power extraction compared to a traditional horizontal axis single rotor system. We report our results and suggest future work.
Third Prize Winner (Trophy, certificate and $1000 prize)
Sara Cardigos, University of Aveiro, Portugal, Using LAUVs in highly dynamic environments: influence of the tidal estuarine outflow in the thermocline structure.
 Abstract—Obtaining in situ data from highly dynamic tidal environments such as estuarine outflows is a challenging task. In the last few years technological development of submarine robotics has been key to oceanographic research. Due to the high spatial and temporal resolution provided and the exceptional maneuverability, LAUVs (Light Autonomous Underwater Vehicles) are instruments with the characteristics required to accomplish the task at hand. The purpose of this study is to demonstrate the use of in situ data, collected by LAUVs, to characterize the Sado estuarine outflow in terms of its vertical thermohaline structure and changes over a semi-diurnal tidal cycle. Results show that water temperature distribution is both dependent on ebb/flood cycle and diurnal radiation, generating a temporary thermocline. However, the vertical water temperature structure presents significant spatial differences along the transect monitored by the LAUVs.
Abstract—Obtaining in situ data from highly dynamic tidal environments such as estuarine outflows is a challenging task. In the last few years technological development of submarine robotics has been key to oceanographic research. Due to the high spatial and temporal resolution provided and the exceptional maneuverability, LAUVs (Light Autonomous Underwater Vehicles) are instruments with the characteristics required to accomplish the task at hand. The purpose of this study is to demonstrate the use of in situ data, collected by LAUVs, to characterize the Sado estuarine outflow in terms of its vertical thermohaline structure and changes over a semi-diurnal tidal cycle. Results show that water temperature distribution is both dependent on ebb/flood cycle and diurnal radiation, generating a temporary thermocline. However, the vertical water temperature structure presents significant spatial differences along the transect monitored by the LAUVs.
Mohammad Hossein Behgam, Missouri University of Science and Technology, USA, Coding for Short Messages in Multipath Underwater Acoustic Communication Channels.
 Abstract—This paper applies the full tail-biting (FTB) convolutional codes to short data packets and evaluates their performance in underwater acoustic communication by computer simulation and an ocean experiment. The simulation results for AWGN channels show that the FTB codes achieve the similar bit error rate (BER) performance as the zero-tailing convolutional (ZTC) codes regardless of block lengths, while the direct-truncate convolutional (DTC) codes suffer from BER degradation, especially with short block lengths. Both simulation and ocean experimental results demonstrate that the FTB codes are excellent candidates for underwater acoustic communication systems where short data blocks and strong error correction codes are needed.
Abstract—This paper applies the full tail-biting (FTB) convolutional codes to short data packets and evaluates their performance in underwater acoustic communication by computer simulation and an ocean experiment. The simulation results for AWGN channels show that the FTB codes achieve the similar bit error rate (BER) performance as the zero-tailing convolutional (ZTC) codes regardless of block lengths, while the direct-truncate convolutional (DTC) codes suffer from BER degradation, especially with short block lengths. Both simulation and ocean experimental results demonstrate that the FTB codes are excellent candidates for underwater acoustic communication systems where short data blocks and strong error correction codes are needed.
Xinwei Chen, Memorial University of Newfoundland, Canada, Gaussian Process Regression for Estimating Wind Speed from X-band Marine Radar Images.
 Abstract—A Gaussian process regression (GPR) based method for estimating wind speed from X-band marine radar images is proposed. The dependence of histogram pattern of radar images on wind speed and rain condition is first observed. Then the feature vectors based on bin values of histograms are extracted. Two models, which estimate wind speed from rain-free and rain-contaminated images respectively, are trained using GPR algorithm. Radar and anemometer data collected from a sea trial near Halifax, Canada are used for validation. Compared to the ensemble empirical mode decomposition (EEMD) based methods, the accuracy of wind speed estimation is further improved with a reduction of about 0.13 m/s for rain-free images and 0.18 m/s for rain-contaminated images in root mean square deviation (RMSD).
Abstract—A Gaussian process regression (GPR) based method for estimating wind speed from X-band marine radar images is proposed. The dependence of histogram pattern of radar images on wind speed and rain condition is first observed. Then the feature vectors based on bin values of histograms are extracted. Two models, which estimate wind speed from rain-free and rain-contaminated images respectively, are trained using GPR algorithm. Radar and anemometer data collected from a sea trial near Halifax, Canada are used for validation. Compared to the ensemble empirical mode decomposition (EEMD) based methods, the accuracy of wind speed estimation is further improved with a reduction of about 0.13 m/s for rain-free images and 0.18 m/s for rain-contaminated images in root mean square deviation (RMSD).
Fábio Cruz, University of Minho/ISISE, Portugal, Structural design of an innovative multifunctional artificial reef.
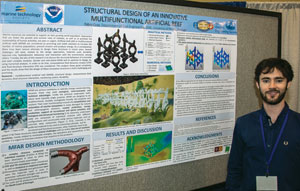 Abstract—Marine resources are essential to support an ever growing world population and approaches that can foster the growth and survival rates of habitats and promote the sustainability of human activities are seen as urgent. Artificial reefs (AR) or multifunctional artificial reefs (MFAR) are considered promising and viable solutions to increase the number of marine populations, prevent erosion and produce energy. As a consequence, there have been several attempts to design these structures in recent years. Several challenges still exist, related to the design approaches, materials used, durability requirements, hydrodynamic behaviour and interaction with the environment (fluid), among others. Thereby, the aim of this research is to discuss the structural behaviour of a concrete and steel complex, modular, slender and reticulated MFAR and to develop its design, by using numerical analysis. In order to do that, computational fluid dynamics models (CFD) and fluid-structure interaction (FSI) are considered. This analysis shows great complexity and the results show that the design of these innovative structures is both challenging and promising.
Abstract—Marine resources are essential to support an ever growing world population and approaches that can foster the growth and survival rates of habitats and promote the sustainability of human activities are seen as urgent. Artificial reefs (AR) or multifunctional artificial reefs (MFAR) are considered promising and viable solutions to increase the number of marine populations, prevent erosion and produce energy. As a consequence, there have been several attempts to design these structures in recent years. Several challenges still exist, related to the design approaches, materials used, durability requirements, hydrodynamic behaviour and interaction with the environment (fluid), among others. Thereby, the aim of this research is to discuss the structural behaviour of a concrete and steel complex, modular, slender and reticulated MFAR and to develop its design, by using numerical analysis. In order to do that, computational fluid dynamics models (CFD) and fluid-structure interaction (FSI) are considered. This analysis shows great complexity and the results show that the design of these innovative structures is both challenging and promising.
João Fula, University of Porto, Portugal, AUV self-localization in structured environments using a scanning sonar and an extended Kalman filter.
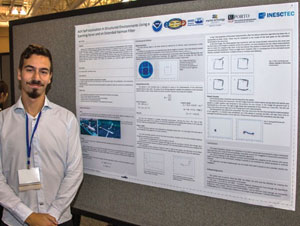 Abstract—Autonomous Underwater Vehicles (AUV) are growing in importance for their many underwater applications, due to their characteristics and functionalities. Making use of a imaging sonar, it is possible to acquire the AUV’s distance to existing obstacles. Then, through an implementation of a feature detection algorithm and an estimator, it is possible to interpolate the vehicle’s relative position. This paper proposes a localization method for structured environments employing a mechanical scanning sonar feeding an extended Kalman filter. Some tests were then run in two different water tanks in order to verify the effectiveness of the solutions. These tests were performed in two different phases. For the first one, all the readings were taken with the vehicle steady and immobile. The second phase was executed with the vehicle in motion. The results are presented and compared against ground-truth measurements.
Abstract—Autonomous Underwater Vehicles (AUV) are growing in importance for their many underwater applications, due to their characteristics and functionalities. Making use of a imaging sonar, it is possible to acquire the AUV’s distance to existing obstacles. Then, through an implementation of a feature detection algorithm and an estimator, it is possible to interpolate the vehicle’s relative position. This paper proposes a localization method for structured environments employing a mechanical scanning sonar feeding an extended Kalman filter. Some tests were then run in two different water tanks in order to verify the effectiveness of the solutions. These tests were performed in two different phases. For the first one, all the readings were taken with the vehicle steady and immobile. The second phase was executed with the vehicle in motion. The results are presented and compared against ground-truth measurements.
Anil Ganti, Duke University, USA, Calibration of Sonar Arrays Composed of Multiple Sub-arrays.
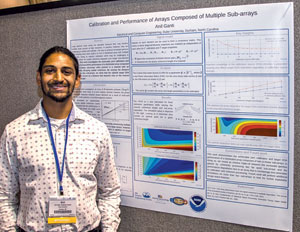 Abstract—Distributed sonar arrays are promising in achieving high resolution acoustic imaging. For such arrays, however, the array manifold must be estimated from observations using calibration sources. This paper investigates the performance bounds on jointly estimating the manifold parameters of a distributed array as well as the direction of arrival of an unknown target. Simulations use two calibration sources with known bearings and a single target with an unknown bearing. It is shown that for a system of two uniform linear arrays in channels with exponentially decaying spatial coherence, there are predictable optimal separations between the sub-arrays. Furthermore, the optimal separation is shown to be nearly invariant to source calibration and target parameters.
Abstract—Distributed sonar arrays are promising in achieving high resolution acoustic imaging. For such arrays, however, the array manifold must be estimated from observations using calibration sources. This paper investigates the performance bounds on jointly estimating the manifold parameters of a distributed array as well as the direction of arrival of an unknown target. Simulations use two calibration sources with known bearings and a single target with an unknown bearing. It is shown that for a system of two uniform linear arrays in channels with exponentially decaying spatial coherence, there are predictable optimal separations between the sub-arrays. Furthermore, the optimal separation is shown to be nearly invariant to source calibration and target parameters.
Johanna Hansen, McGill University, Canada, Autonomous Marine Sampling Enhanced by Strategically Deployed Drifters in Marine Flow Fields.
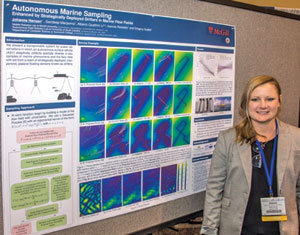 Abstract—We present a transportable system for ocean observations in which a small autonomous surface vehicle (ASV) adaptively collects spatially diverse samples with aid from a team of inexpensive, passive floating sensors known as drifters. Drifters can provide an increase in spatial coverage at little cost as they are propelled about the survey area by the ambient flow field instead of with actuators. Our iterative planning approach demonstrates how we can use the ASV to strategically deploy drifters into points of the flow field for high expected information gain, while also adaptively sampling the space. In this paper, we examine the performance of this heterogeneous sensing system in simulated flow field experiments.
Abstract—We present a transportable system for ocean observations in which a small autonomous surface vehicle (ASV) adaptively collects spatially diverse samples with aid from a team of inexpensive, passive floating sensors known as drifters. Drifters can provide an increase in spatial coverage at little cost as they are propelled about the survey area by the ambient flow field instead of with actuators. Our iterative planning approach demonstrates how we can use the ASV to strategically deploy drifters into points of the flow field for high expected information gain, while also adaptively sampling the space. In this paper, we examine the performance of this heterogeneous sensing system in simulated flow field experiments.
Md Modasshir, University of South Carolina, USA, MDNet: Multi-Patch Dense Network for Coral Classification.
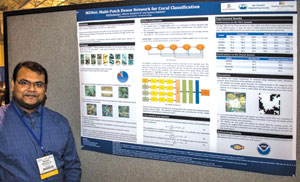 Abstract—Classifying coral species from visual data is a challenging task due to significant intra-species variation, high interspecies similarity, inconsistent underwater image clarity, and high dataset imbalance. In addition, point annotation, the labeling method used for coral reef images by marine biologists, is prone to mislabeling. Point annotation also makes existing datasets incompatible with state-of-the-art classification methods which use the bounding box annotation technique. In this paper, we present a novel end-to-end Convolutional Neural Network (CNN) architecture, Multi-Patch Dense Network (MDNet) that can learn to classify coral species from point annotated visual data. The proposed approach utilizes patches of different scale centered on point annotated objects. Furthermore, MDNet utilizes dense connectivity among layers to reduce over-fitting on imbalanced datasets. Experimental results on the Moorea Labeled Coral (MLC) benchmark dataset are presented. The proposed MDNet achieves higher accuracy and average class precision than the state-of-the-art approaches.
Abstract—Classifying coral species from visual data is a challenging task due to significant intra-species variation, high interspecies similarity, inconsistent underwater image clarity, and high dataset imbalance. In addition, point annotation, the labeling method used for coral reef images by marine biologists, is prone to mislabeling. Point annotation also makes existing datasets incompatible with state-of-the-art classification methods which use the bounding box annotation technique. In this paper, we present a novel end-to-end Convolutional Neural Network (CNN) architecture, Multi-Patch Dense Network (MDNet) that can learn to classify coral species from point annotated visual data. The proposed approach utilizes patches of different scale centered on point annotated objects. Furthermore, MDNet utilizes dense connectivity among layers to reduce over-fitting on imbalanced datasets. Experimental results on the Moorea Labeled Coral (MLC) benchmark dataset are presented. The proposed MDNet achieves higher accuracy and average class precision than the state-of-the-art approaches.
Elizabeth Olson, University of Michigan, USA, Deep Learning for Disparity Estimation of Underwater Images with Synthetic Data.
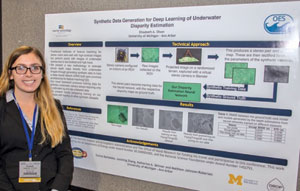 Abstract—In this paper, we present a new methodology to generate synthetic data for training a deep neural network (DNN) to estimate depth maps directly from stereo images of underwater scenes. The proposed method projects real underwater images onto landscapes of randomized heights in a 3D rendering framework. This procedure provides a synthetic stereo image pair and the corresponding depth map of the scene, which are used to train a disparity estimation DNN. Through this process, we learn to match the underwater feature space using supervised learning without the need to capture extensive real underwater depth maps for ground truth. In our results, we demonstrate improved accuracy of reconstruction compared to traditional computer vision feature matching methods and state-of-the-art DNNs trained on synthetic terrestrial data.
Abstract—In this paper, we present a new methodology to generate synthetic data for training a deep neural network (DNN) to estimate depth maps directly from stereo images of underwater scenes. The proposed method projects real underwater images onto landscapes of randomized heights in a 3D rendering framework. This procedure provides a synthetic stereo image pair and the corresponding depth map of the scene, which are used to train a disparity estimation DNN. Through this process, we learn to match the underwater feature space using supervised learning without the need to capture extensive real underwater depth maps for ground truth. In our results, we demonstrate improved accuracy of reconstruction compared to traditional computer vision feature matching methods and state-of-the-art DNNs trained on synthetic terrestrial data.
Vikram Patil, North Carolina State University, USA, Development of an Efficient Compressor for Ocean Compressed Air Energy Storage.
 Abstract—Utilization of intermittent ocean energy resources can be improved by integrating them with an energy storage system. Ocean compressed air energy storage (OCAES) is a promising large-scale energy storage system in the proximity of ocean energy resources. Efficient compressors and expanders are needed to achieve a high roundtrip efficiency of OCAES systems. In this paper, the development of an efficient liquid piston compressor is discussed. Heat transfer enhancement techniques such as aqueous foam and spray cooling are tested in a liquid piston compressor to achieve a highly efficient near-isothermal compression. It is observed that both aqueous foam and spray cooling are highly effective in abating the rise of air temperature during compression and improve the isothermal efficiency of compression. The use of aqueous foam in a liquid piston compressor shows an isothermal efficiency up to 91% whereas spray cooling results in an isothermal efficiency up to 96%. Efficiency analysis of liquid piston based OCAES systems with aqueous foam and spray cooling indicate the potential improvement of 4-14% in roundtrip efficiency of OCAES with the use of aqueous foam and 10-20% improvement with the spray cooling.
Abstract—Utilization of intermittent ocean energy resources can be improved by integrating them with an energy storage system. Ocean compressed air energy storage (OCAES) is a promising large-scale energy storage system in the proximity of ocean energy resources. Efficient compressors and expanders are needed to achieve a high roundtrip efficiency of OCAES systems. In this paper, the development of an efficient liquid piston compressor is discussed. Heat transfer enhancement techniques such as aqueous foam and spray cooling are tested in a liquid piston compressor to achieve a highly efficient near-isothermal compression. It is observed that both aqueous foam and spray cooling are highly effective in abating the rise of air temperature during compression and improve the isothermal efficiency of compression. The use of aqueous foam in a liquid piston compressor shows an isothermal efficiency up to 91% whereas spray cooling results in an isothermal efficiency up to 96%. Efficiency analysis of liquid piston based OCAES systems with aqueous foam and spray cooling indicate the potential improvement of 4-14% in roundtrip efficiency of OCAES with the use of aqueous foam and 10-20% improvement with the spray cooling.
Vítor Pinto, FEUP / INESC TEC, Portugal, An Automated Launch and Recovery System for AUVs.
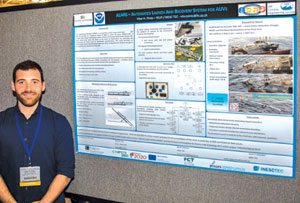 Abstract—Underwater sensing and mapping operations using autonomous vehicles are becoming widely used. This article describes an automated system to launch and recover an AUV. It can operate in any host platform and can transport any torpedo-shaped vehicle with 0.2 meters of diameter, length up to 3 meters and weight up to 1000 N. The system ensures a restrained transportation of the vehicle and guarantees that it performs a smooth entrance in the water. It was instrumented for continuous status remote monitoring, using linear and angular motion sensors, as well as enables to remotely take control over the operation. Experimental results carried out within the XPRIZE competition demonstration scope are presented.
Abstract—Underwater sensing and mapping operations using autonomous vehicles are becoming widely used. This article describes an automated system to launch and recover an AUV. It can operate in any host platform and can transport any torpedo-shaped vehicle with 0.2 meters of diameter, length up to 3 meters and weight up to 1000 N. The system ensures a restrained transportation of the vehicle and guarantees that it performs a smooth entrance in the water. It was instrumented for continuous status remote monitoring, using linear and angular motion sensors, as well as enables to remotely take control over the operation. Experimental results carried out within the XPRIZE competition demonstration scope are presented.
William Rizzo, University of Padova, Italy, AUVs Telemetry Range Extension through a Multimodal Underwater Acoustic Network.
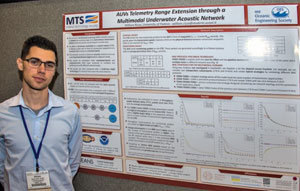 Abstract—In this paper, we describe an underwater multihop network scenario based only on acoustic modems operating at different frequencies. The idea is to remotely control an Autonomous Underwater Vehicle (AUV) and verify whether it is able to follow the path sent by a control station (CTR) in the form of consecutive waypoints. The AUV sends back packets that can be monitoring or control information. We tested by simulation different MAC layer protocols to compare their performance in terms of throughput and packet delivery delay, in particular focusing on both contention-free (TDMA-based) and contention-based (CSMA-based) protocols, to analyze which solution performs better in different network conditions varying the amount of traffic generated by the AUV during its mission.
Abstract—In this paper, we describe an underwater multihop network scenario based only on acoustic modems operating at different frequencies. The idea is to remotely control an Autonomous Underwater Vehicle (AUV) and verify whether it is able to follow the path sent by a control station (CTR) in the form of consecutive waypoints. The AUV sends back packets that can be monitoring or control information. We tested by simulation different MAC layer protocols to compare their performance in terms of throughput and packet delivery delay, in particular focusing on both contention-free (TDMA-based) and contention-based (CSMA-based) protocols, to analyze which solution performs better in different network conditions varying the amount of traffic generated by the AUV during its mission.
Pedro Rodrigues, FEUP, Portugal, Altitude control of an underwater vehicle based on computer vision.
 Abstract—It is common the use of the sonar technology in order acquire and posteriorly control the distance of an underwater vehicle towards an obstacle. Although this solution simplifies the problem and is effective in most cases, it might carry some disadvantages in certain underwater vehicles or conditions. In this work it is presented a system capable of controlling the altitude of an underwater vehicle using computer vision. The sensor capable of computing the distance is composed of a CCD camera and 2 green pointer lasers. Regarding the control of the vehicle, the solution used was based on the switching of two controllers, a velocity controller (based on a PI controller), and a position controller (based on a PD controller). The vehicle chosen to test the developed system was a profiler, which main task is the vertical navigation. The mathematical model was obtained and used in order to validate the controllers designed using the Simulink toolbox from Matlab. It was used a Kalman filter in order to have a better estimation of the state variables (altitude, depth, and velocity). The tests relative to the sensor developed responsible for the acquisition of the altitude showed an average relative error equal to 1 % in the range from 0 to 2.5 m. The UWsim underwater simulation environment was used in order to validate the integration of the system and its performance.
Abstract—It is common the use of the sonar technology in order acquire and posteriorly control the distance of an underwater vehicle towards an obstacle. Although this solution simplifies the problem and is effective in most cases, it might carry some disadvantages in certain underwater vehicles or conditions. In this work it is presented a system capable of controlling the altitude of an underwater vehicle using computer vision. The sensor capable of computing the distance is composed of a CCD camera and 2 green pointer lasers. Regarding the control of the vehicle, the solution used was based on the switching of two controllers, a velocity controller (based on a PI controller), and a position controller (based on a PD controller). The vehicle chosen to test the developed system was a profiler, which main task is the vertical navigation. The mathematical model was obtained and used in order to validate the controllers designed using the Simulink toolbox from Matlab. It was used a Kalman filter in order to have a better estimation of the state variables (altitude, depth, and velocity). The tests relative to the sensor developed responsible for the acquisition of the altitude showed an average relative error equal to 1 % in the range from 0 to 2.5 m. The UWsim underwater simulation environment was used in order to validate the integration of the system and its performance.
Jonatan Scharff Willners, Heriot-Watt University, UK, Autonomous Maritime Vehicle Planning and Tracking under Kinodynamic Constraints.
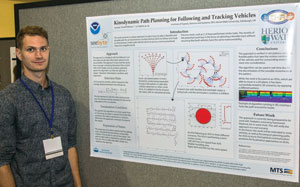 Abstract—This paper presents a novel approach to planning vehicle paths under kinodynamic constraints in a leader follower scenario where the follower vehicle has to track and follow the leader. This problem is important in the maritime domain where Autonomous Underwater Vehicles (AUVs) can greatly benefit from an Autonomous Surface Vehicle (ASV) acting as a Communication Relay (CR) and/or a Navigational Aid (NA), typically using acoustic communication. The proposed approach is an extension of Hybrid-A* (HA*), a hybrid version of A* which enables the derivation of paths that are obstacle free and feasible by the vehicle. The proposed algorithm finds a solution, if it exists, for scenarios where the leader and the follower operate under the same kinematic constraints as well as when they differ. Various simulations using multiple configurations and scenarios are presented to validate the approach. Whilst the work presented here has a focus on the maritime environment, the algorithm is applicable to other domains.
Abstract—This paper presents a novel approach to planning vehicle paths under kinodynamic constraints in a leader follower scenario where the follower vehicle has to track and follow the leader. This problem is important in the maritime domain where Autonomous Underwater Vehicles (AUVs) can greatly benefit from an Autonomous Surface Vehicle (ASV) acting as a Communication Relay (CR) and/or a Navigational Aid (NA), typically using acoustic communication. The proposed approach is an extension of Hybrid-A* (HA*), a hybrid version of A* which enables the derivation of paths that are obstacle free and feasible by the vehicle. The proposed algorithm finds a solution, if it exists, for scenarios where the leader and the follower operate under the same kinematic constraints as well as when they differ. Various simulations using multiple configurations and scenarios are presented to validate the approach. Whilst the work presented here has a focus on the maritime environment, the algorithm is applicable to other domains.
Murilo Silva, Memorial University of Newfoundland, Canada, An Improved Nonlinear Extraction of Directional Ocean Wave Spectrum from Bistatic HFSWR Using Tikhonov Regularization in Hilbert Scales.
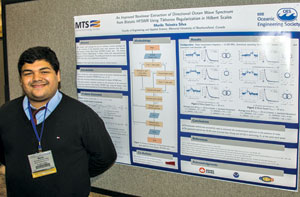 Abstract—The present work proposes the use of a non-linear inversion technique for the extraction of the directional ocean wave spectrum from bistatic High-Frequency Surface Wave Radar (HFSWR) Doppler data. The extraction method is combined with empirical expressions, solely based on the Doppler data, to retrieve wind speed and direction. Once the initialization parameters have been defined using these empirical expressions, a blind iterative algorithm based on Tikhonov regularization in Hilbert Scales is used to extract the non-directional spectrum. The extracted spectrum is then used to determine the directional factor, which is assumed to be described by a cosine-power model. The proposed method yields good results with synthetic noise-contaminated HFSWR data with a priori regularization parameters.
Abstract—The present work proposes the use of a non-linear inversion technique for the extraction of the directional ocean wave spectrum from bistatic High-Frequency Surface Wave Radar (HFSWR) Doppler data. The extraction method is combined with empirical expressions, solely based on the Doppler data, to retrieve wind speed and direction. Once the initialization parameters have been defined using these empirical expressions, a blind iterative algorithm based on Tikhonov regularization in Hilbert Scales is used to extract the non-directional spectrum. The extracted spectrum is then used to determine the directional factor, which is assumed to be described by a cosine-power model. The proposed method yields good results with synthetic noise-contaminated HFSWR data with a priori regularization parameters.
Katerina Soltan, Olin College, USA, Characterization of Miniature Underwater Actuator for Biomimetic Propulsion.
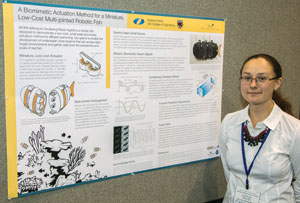 Abstract—This paper presents the Miniature Oscillating Robot Agent (MORA). MORA is a small (12 cm) and low-cost (~$100) robotic fish which was designed to demonstrate a biomimetic actuation method for efficient swimming. Our goal is to enable the development of underwater robot swarms that can access tight, fragile environments and gather data from the perspective and scale of real fish. Conventional actuation methods are often too large, expensive, or mechanically complex to use in collective behavior applications, which to be practical must be easy to manufacture, low-cost, and small. We arranged six magnet-incoil (MIC) actuators, at $1/unit, in a multi-jointed configuration of three independently controlled joints. Oscillating the joints in a sinusoidal waveform allowed us to replicate the efficient undulatory body motion seen in fish. to replicate the efficient undulatory motion seen in fish. In initial straight-line swimming experiments, MORA achieved a speed of 0.37 BL/s with the potential for faster and more coordinated movement with further experimentation of MIC control settings.
Abstract—This paper presents the Miniature Oscillating Robot Agent (MORA). MORA is a small (12 cm) and low-cost (~$100) robotic fish which was designed to demonstrate a biomimetic actuation method for efficient swimming. Our goal is to enable the development of underwater robot swarms that can access tight, fragile environments and gather data from the perspective and scale of real fish. Conventional actuation methods are often too large, expensive, or mechanically complex to use in collective behavior applications, which to be practical must be easy to manufacture, low-cost, and small. We arranged six magnet-incoil (MIC) actuators, at $1/unit, in a multi-jointed configuration of three independently controlled joints. Oscillating the joints in a sinusoidal waveform allowed us to replicate the efficient undulatory body motion seen in fish. to replicate the efficient undulatory motion seen in fish. In initial straight-line swimming experiments, MORA achieved a speed of 0.37 BL/s with the potential for faster and more coordinated movement with further experimentation of MIC control settings.
 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.