Dr. Shyam Madhusudhana, OES Student Poster Competition Chair
Photo credits: Nicholas Chotiros, Caoimhe Corrigan, and Manu Ignatius

Col. Normal Miller conceived and brought to life the esteemed Student Poster Competition (SPC) during the 1989 Seattle OCEANS conference. Since its inception, the SPC has remained a prominent highlight of OCEANS conferences worldwide. Welcoming undergraduate and graduate students from esteemed institutions across the globe, the SPC stands tall as a flagship event of the esteemed MTS/OES OCEANS conferences. Each year, we witness a plethora of aspiring talents vying for a spot in the Competition. Through a stringent two-stage review process of their submitted abstracts, we handpick a select group of 15–20 students who demonstrate exceptional promise. These chosen candidates’ conference registration fees are waived, and they also receive financial support to aid their travel and accommodation expenses.
The success of the SPC would not be possible without the generous support of our sponsoring societies — OES and MTS. We extend our heartfelt gratitude to the Office of Naval Research—Global (ONR-G) for their unwavering financial backing, which has allowed us to continue nurturing the next generation of brilliant minds. The Schmidt Ocean Institute has generously continued their contribution of prize money for this edition of the SPC.
The Limerick OCEANS SPC received a whopping 83 abstracts. The Local Organizing Committee’s (LOC) SPC Chair, Petar Trslic, and Coordination Chair, Isela Ibrahimovic, bravely took on the gargantuan task of running the SPC successfully. Out of the submissions received, 14 abstracts were shortlisted for the final program. Of these, one participant could not attend due to visa issues. The poster sessions were very well attended, and the students seemed to have enjoyed their time at the conference. We had a panel of 7 judges who generously offered their time, speaking to each participant and scoring their posters. We are grateful for their support. The awards ceremony was held prior to the exhibitors’ luncheon on the final day of the conference. Participation certificates and winning prizes were handed out by the sponsoring societies’ Presidents — Christopher Whitt (OES) and Justin Manley (MTS).
The list of participants (including the prize winners), together with their affiliation, poster title and an abstract of their poster, are given below.
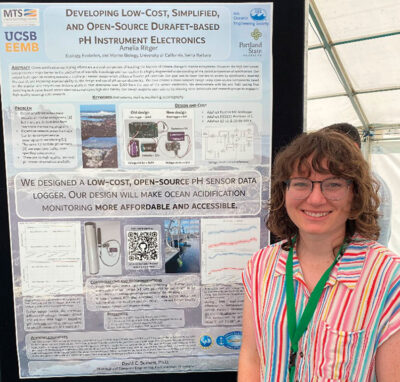 First prize (Norman Miller Award) (Certificate and $ 3000)
First prize (Norman Miller Award) (Certificate and $ 3000)
Amelia Ritger, University of California, Santa Barbara, USA
Developing Low-Cost, Simplified, and Open-Source Durafet-based pH Instrument Electronics
Abstract— Ocean acidification monitoring efforts are a crucial component of tracking the impacts of climate change in marine ecosystems. However, the high instrument cost presents a major barrier to the production of scientific knowledge and has resulted in a highly fragmented understanding of the global progression of acidification. Our project built upon an existing nearshore marine pH sensor design which utilizes a Durafet pH electrode. Our goal was to lower barriers to access by significantly lowering the cost of, and improving approachability to, the design and use of pH sensor electronics. We have created a more compact design using open-source components based on the popular and easy-to-use Arduino platform that eliminates over $900 from the cost of the sensor electronics. We demonstrate with lab and field testing that switching to Arduino-based sensor electronics maintains high data fidelity. Our design supports open science by allowing more individuals and research groups to engage in high-quality oceanographic research.
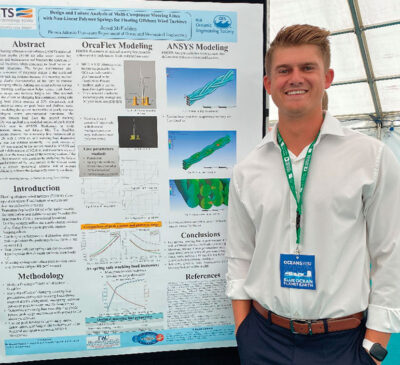 Second prize (Certificate and $ 2000)
Second prize (Certificate and $ 2000)
Jared McFadden, Florida Atlantic University, USA
Design and Failure Analysis of Multi-Component Mooring Lines with Non-Linear Polymer Springs for Floating Offshore Wind Turbines
Abstract— Floating offshore wind turbines (FOWT) stationed in transition depths (50-80 m) offer easier access for installation and maintenance and broaden the spectrum of operational locations when compared to fixed bottom or deep-water structures. The fatigue performance and abrasion resistance of polyester makes it the preferred choice for taut leg systems because this mooring method uses the elastic characteristics of the rope to provide station keeping effects. Adding non-linear polymer springs to this mooring configuration helps reduce peak loads, platform surge, and increase fatigue life. This research studied the effects of changing line pretension, spring safe working load (force exerted at 50% elongation), and spring response curve on peak loads and platform surge first by modeling the system in OrcaFlex at yearly average and 50-year storm environmental conditions. The maximum tension load from the optimized mooring assembly was applied to a modeled section of the 8-strand multiplait rope in ANSYS Workbench to study deformation, stress, and fatigue life. The OrcaFlex simulations showed that a mooring line pretensioned at 1250 kN with a 4500 kN safe working load degressive spring was the optimal assembly. The peak tension of 3717 kN was applied to the section model in ANSYS and yielded a deformation of 0.268 m and maximum stress of 3.20e8 Pa at the inner radius of the weaving section of the rope. This research will
continue by analyzing the fatigue life performance of the rope section at the 50-year storm data to predict operational lifetime and at average conditions to validate the design with industry standards.
 Third prize (Certificate and $ 1000)
Third prize (Certificate and $ 1000)
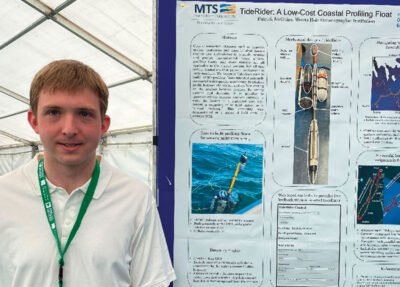
Patrick McGuire, Woods Hole Oceanographic Institution, USA
TideRider: A Low-Cost Coastal Profiling Float
Abstract— Coastal ecosystem stressors such as hypoxia, marine heatwaves and harmful algal blooms require new technologies to properly monitor and predict. Instrumented buoys, gliders, profiling floats, and shore stations are all applicable to the coastal domain, but all face certain limitations that prevent deployment in large numbers. We designed TideRider, easy to build, $1600 profiling floats intended primarily for coastal water quality monitoring.
TideRiders profile between the surface and seafloor, resting on the seafloor between profiles. By timing ascents and descents, it is possible to opportunistically harness ambient currents to move the devices in a controlled way, e.g., toward a waypoint, or to hold station as a “virtual mooring.” This capability was demonstrated in a series of field tests in summer 2022.
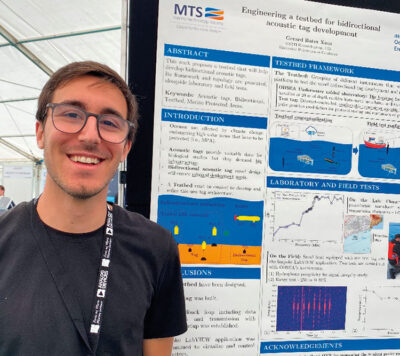 Gerard Batet, Universitat Politecnica de Catalunya, Spain
Gerard Batet, Universitat Politecnica de Catalunya, Spain
Engineering a testbed for bidirectional acoustic tag development
Abstract— Marine protected areas (MPAs) have been implemented to mitigate the effects of climate change and overfishing on various marine ecosystems. Nonetheless, these areas need monitoring to ensure their actual utility. Tools like acoustic tags are used to study the animals’ behavioural patterns and obtain valuable information to improve MPAs. Recently, new
architectures have been proposed to overcome the inherent limitations of off-the-shelf tags, for example, by implementing bidirectional communication capabilities with the newly developed open protocol from European Tracking Network. In this paper, the testbed topology and methodology used to develop these bidirectional acoustic tags are discussed alongside the laboratory results achieved.
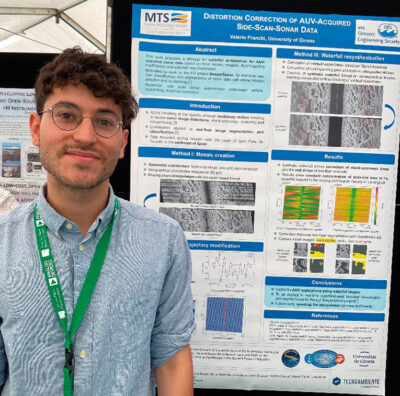 Valerio Franchi, University of Girona, Spain
Valerio Franchi, University of Girona, Spain
Distortion Correction of AUV-acquired Side-Scan Sonar Data
Abstract— Side scan sonars (SSS) are types of sonars that produce representations of the sea-bed by emitting and receiving acoustic fan-shaped pulses perpendicularly to the motion of the sensor in the water. Generally, SSS are deployed from a towed vehicle pulled from a boat at high speed to avoid oscillatory motions and thus achieve a clean and consistent sea-bed scan. Our approach targets the use of SSSs on small AUVs with limited computing power, and travelling at slow speeds, where the waterfall is directly used for real-time classfication. Due to the increased oscillatory motion, the SSS waterfall tends to have significant distortion, that will preclude the classifier from obtaining correct results. The algorithm described in this paper performs a geometric correction of the sonar scanlines by taking into account the AUV’s change in height, yaw and pitch to calculate correctly their positions on the seabed. The data is mapped into a 2D grid using the scanline intensities to form a mosaic, and the missing mosaic pixels are interpolated using a Gaussian-based kernel. The waterfall is recreated by considering a modified AUV trajectory with smooth changes in heading and a null pitch. The results show a significant improvement in the waterfall output, removing unwanted distortions and displaying the seabed structures with higher geometric consistency. In addition, the concentration of the ping data on the waterfall is constant all around, compared to the varying contribution density in the original one.
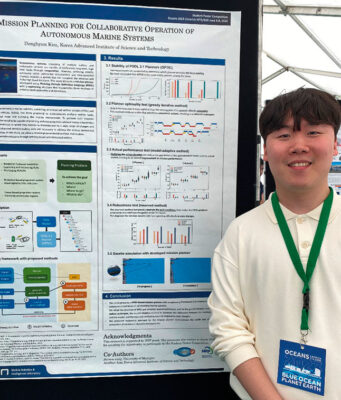 Donghyun Kim, Korea Advanced Institute of Science and Technology, Republic of Korea
Donghyun Kim, Korea Advanced Institute of Science and Technology, Republic of Korea
Mission planning for collaborative operation of autonomous marine systems
Abstract— Autonomous systems consisting of multiple surface and underwater vehicles are capable of performing long-term, high level tasks through cooperation. However, achieving reliable autonomy under substantial uncertaies and environmental changes requires a system that can recognize the situation and make high-level decisions. This study presents a mission planner developed using Planning Domain Definition Language (PDDL) with a replanning structure that incorporates three methods to enhance both optimality and robustness. The planner employs three methods to achieve this: the greedy iterative method improves the planner’s optimality, the model adaptive reduces the gap between the environment and the model to increase operational performance, and the reserved enhances mission success rates by allowing the planner to adapt to changes in the environment. We demonstrate that the proposed mission planner can provide an efficient and stable plan to complete a mission.
 Xi Lu, University of British Columbia, Canada
Xi Lu, University of British Columbia, Canada
Transfer Learning of Image Classification Networks in Application to Dolphin Whistle Detection
Abstract— Dolphin whistle detection is an important and multi-purpose but time-consuming task. The ability to automate and streamline this process can be invaluable for future research in marine studies and other fields that aim to utilise these signals. When dealing with underwater acoustics, a large obstacle to overcome is the abundance of noise and interfering sounds, natural and anthropogenic alike. In this paper, we apply successful image classification networks to two separate datasets containing dolphin whistles with the goal of determining an effective method to conduct automated detection with minimal interference from a manual operator regardless of environment. We further investigate the impacts of shrinking the dataset size and performing parameter freezing on the networks at hand. Networks are assessed by their detection accuracy and achieve performances comparable to those in existing works, the best being 96.7%, thus proving the effectiveness of these pre-trained image classification models.
 António Oliveira, Faculdade de Engenharia da Universidade do Porto, Portugal
António Oliveira, Faculdade de Engenharia da Universidade do Porto, Portugal
Feature Extraction Towards Underwater SLAM using Imaging Sonar
Abstract— Blob features are particularly common in acoustic imagery, as isolated objects (e.g., moorings, mines, rocks) appear as blobs in the acquired images. This work focuses the application of the SIFT, SURF, KAZE and U-SURF feature extraction algorithms for blob feature tracking towards Simultaneous Localization and Mapping applications. We introduce a modified feature extraction and matching pipeline intended to improve feature detection and matching precision, tackling performance deterioration caused by the differences between optical and acoustic imagery. Experimental evaluation was undertaken resorting to datasets collected from a water tank structure.
 Patryk Olszewski, Aalborg University Esbjerg, Denmark
Patryk Olszewski, Aalborg University Esbjerg, Denmark
On Cathodic Protection Monitoring and Inspection of Seabed Pipelines
Abstract— Cathodic Protection (CP), alongside coating, is the primary prevention technique against corrosion of seabed pipelines. This system requires a regular monitoring that ensures its proper functioning. This study presents a review of existing, widely used methods for CP surveillance. Additionally, an optimal and robust surveillance method, based on testing stations using Wireless Sensor Network (WSN) mediated by an Autonomous Underwater Vehicle (AUV), is described. The description involves powering of the test station, its communication with the AUV as well as the navigation requirements for pipe following of the vehicle.
 Jingyu Song, University of Michigan, USA
Jingyu Song, University of Michigan, USA
Uncertainty-Aware Acoustic Localization and Mapping for Underwater Robots
Abstract— For underwater vehicles, robotic applications have the added difficulty of operating in highly unstructured and dynamic environments. Environmental effects impact not only the dynamics and controls of the robot but also the perception and sensing modalities. Acoustic sensors, which inherently use mechanically vibrated signals for measuring range or velocity, are
particularly prone to the effects that such dynamic environments induce. This paper presents an uncertainty-aware localization and mapping framework that accounts for induced disturbances in acoustic sensing modalities for underwater robots operating near the surface in dynamic wave conditions. For the state estimation task, the uncertainty is accounted for as the added noise caused by the environmental disturbance. The mapping method uses an adaptive kernel-based method to propagate measurement and pose uncertainty into an occupancy map. Experiments are carried out in a wave tank environment to perform qualitative and quantitative evaluations of the proposed method. More details about this project can be found at
https://umfieldrobotics.github.io/PUMA.github.io..
 Simone Tani, Università di Pisa, Italy
Simone Tani, Università di Pisa, Italy
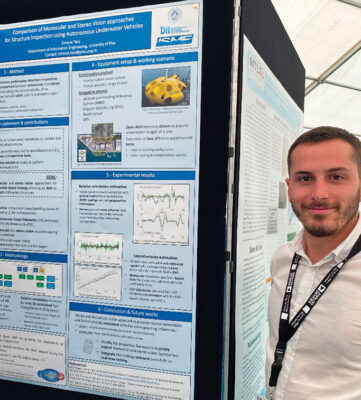
Comparison of Monocular and Stereo Vision approaches for Structure Inspection using Autonomous Underwater Vehicles
Abstract— Periodical inspections are a fundamental operation to monitor the status of underwater structures and to assess their need for proper maintenance or repair interventions. Autonomous Underwater Vehicles (AUVs) could represent a viable option to carry out underwater inspection tasks, potentially bringing benefits in terms of safety for human operators and quality of the collected data. Aiming at developing a fully autonomous vision-based inspection strategy, this paper proposes a comparative analysis between monocular and stereo vision approaches for estimating the lateral velocity of an AUV and its orientation with respect to a target surface. The proposed analysis is performed by exploiting a dataset of real underwater images, collected during at-sea experiments in which the Zeno AUV was remotely driven to carry out a pier inspection. Specifically, the performance of the two solutions in terms of estimation of the robot lateral velocity is assessed by considering doppler velocity log measurements as benchmark. Instead, the accuracy of the estimation of the vehicle orientation with respect to the target is evaluated by taking into account both geographical information of the pier and AUV attitude observations. The comparison suggests that stereo vision provides better performance for estimating the relative orientation between the AUV and the target; on the contrary, the monocular approach produces more reliable lateral velocity estimates. The results obtained prove the suitability of the two vision-based strategies for inspection applications in a real underwater scenario, thus suggesting a possible implementation onboard the reference vehicle.
 Edoardo Topini, University of Florence, Italy
Edoardo Topini, University of Florence, Italy
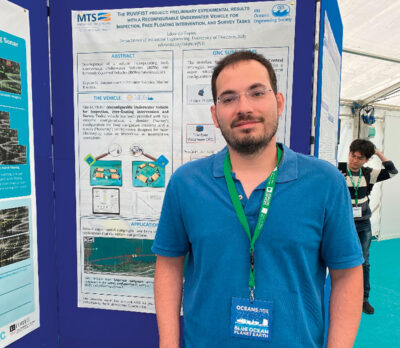
The RUVIFIST project: preliminary experimental results with a Reconfigurable Underwater Vehicle for Inspection, Free Floating Intervention, and Survey Tasks
Abstract— The development of vehicles incorporating both the Autonomous Underwater Vehicle (AUV) and the Remotely Operated Vehicles (ROV) intervention functionalities can be considered one of the most investigated tasks of the underwater industry and the scientific community. A feasible solution can be the development of Autonomous Underwater Reconfigurable Vehicles (AURVs), i.e. vehicles that can change their current configuration depending on the demanded task. Driven by these considerations, an innovative AURV has been developed by the Department of Industrial Engineering of the University of Florence (DIEF), Italy, capable of efficiently reconfiguring its shape according to the task at hand. In particular, the RUVIFIST (Reconfigurable Underwater Vehicle for Inspection, Free-floating Intervention and Survey Tasks) vehicle has been provided with two extreme configurations: a slender (“survey”) configuration for long navigation tasks and a stocky (“hovering”) configuration designed for challenging goals as intervention operations. Consequently, this work presents the results obtained during several experimental campaigns conducted to accurately test the vehicle reconfigurable system and how the standard Guidance, Navigation and Control (GNC) strategies must be adapted for AURVs.
 Laurent Verrier, Exail, France
Laurent Verrier, Exail, France
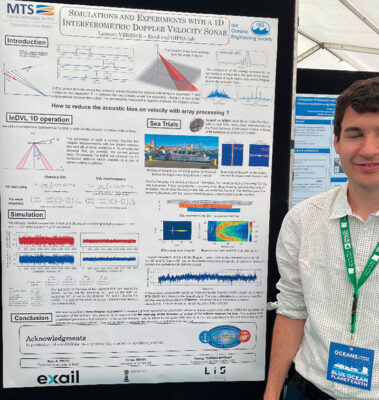
Simulations and Experiments with a 1D Interferometric Doppler Velocity Sonar
Abstract— The Interferometric DVL (InDVL) is a new instrument designed to be free from acoustic bias. The InDVL combines pulse-to-pulse phase comparison, used by all wideband Doppler sonars, with element-to-element phase comparison generally used for direction finding. The most general InDVL receiver array design consists of a 3D ultrashort baseline, with four hydrophones in a tetrahedral configuration allowing the synthesis of three orthogonal baselines. In this paper we study the performance of a much simpler system consisting of a single baseline and present both Monte Carlo simulations and preliminary experimental results using a COTS sonar of opportunity, which is a dual Mills cross scientific echo sounder used for fishery research and obstacle avoidance.
 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.