Dr. Shyam Madhusudhana, OES Student Poster Competition Chair
Photo credits: Jhon Bermudez and Stan Chamberlain
Col. Normal Miller envisioned and created the Student Poster Competition (SPC), and it was first implemented at the Seattle OCEANS conference in 1989. It has been a feature of OCEANS conferences ever since. Open for participation to undergraduate and graduate students from colleges and universities around the world, the SPC is a flagship event of the MTS/OES OCEANS conferences. From the pool of aspiring applicants, typically 15-20 students are selected to participate in the Competition, based on two stages of reviews of their submitted abstracts. Selected candidates enjoy a waiver of conference registration fees and receive financial support towards their travel and accommodation costs. We thank the Office of Naval Research for their continued financial support of SPCs. The prize money for this edition of the SPC was provided by the sponsoring societies OES and MTS.

Deviating slightly from convention, the Hampton Roads Local Organizing Committee’s (LOC) SPC Chairs Robert Heitsenrether and Eric Breuer bravely took on a gargantuan task of inviting a larger pool of candidates to the Competition. Out of 84 submissions received, 27 abstracts were shortlisted for the final program. Of these, 4 students participated virtually. It was very satisfying to see so many participants attend the event in-person. While we had a large faction of participants from the USA (16), there was a good spread of global participation, with 2 students from each of Australia and Portugal, and 1 each from Canada, China, Israel, Italy, Japan, Norway, and Sweden. Kudos to the LOC SPC Chairs for brilliantly managing the increased workload. The poster sessions were very well attended, and the students seemed to have enjoyed their time at the conference. We had a panel of 9 judges that generously offered their time, speaking to each participant and scoring their posters. We are grateful for their support. The awards ceremony was held prior to the exhibitors’ luncheon on the final day of the conference. Participation certificates and winning prizes were handed out by the LOC OCEANS co-Chairs Ray Toll and Laura Rogers along with the sponsoring societies’ Presidents Christopher Whitt (OES) and Zdenka Willis (MTS).

At this edition of the SPC, in addition to awarding prize money to the 1st prize winner, the OES also offered to provide support for travel and registration (up to US$3000) to participate in any of the OES-sponsored conferences in 2023 (including OCEANS). This additional award is aimed to encourage the student to continue to remain engaged with OES’ activities. The student would have an opportunity to contribute to the chosen conference by being a judge in the SPC, by chairing a session and/or other relevant activities identified by the conference’s LOC.
The list of participants (including the prize winners) together with their affiliation, poster title and an abstract of their poster are given below. Apologies to the participants whose photos aren’t included.
 First prize (Norman Miller Award) (Certificate and $ 3000)
First prize (Norman Miller Award) (Certificate and $ 3000)
Jacquelyn Veatch, Rutgers University, USA
High Frequency Radars as Ecological Sensors: Using Lagrangian Coherent Structures to Quantify Prey Concentrating Features
Abstract—Food resources in marine food webs are often concentrated into patches within biological hotspots, separated by large expanses of barren ocean. Inhomogeneous, or “patchy” distribution of plankton is in part due to mesoscale and submesoscale oceanographic features transporting and locally concentrating plankton. Concentrations of plankton at the base of the food web increase prey availability for intermediate and upper trophic levels creating productive regions known as biological hotspots. Submesoscale oceanographic features within coastal biological hotspots occur at spatiotemporal scales that can be resolved by coastal High Frequency Radars (HFR). To identify areas with enhanced passive particle (plankton) transport and concentration, four popular mathematical techniques known as Coherent Structure Analyses (CSA) are applied to HFR observed ocean surface currents. Each CSA technique quantifies the stretching (pulling drifters apart) and shrinking (pushing drifters together) of the flow, yet each has its own unique calculation of “stretching” and “shrinking”. All four CSA have been applied to ocean datasets in previous studies, however results from the four techniques have not been compared and evaluated as valid ecological metrics in energetic coastal flows. The following study will bring clarity to what makes each type of coherent structure differ from the others when applied to plankton transport and concentration in a coastal marine ecosystem. Results show some coherent structures define boarders of transport while others define centers of attraction. The following study uses HFR observed surface currents around a known biological hotspot, Palmer Deep Antarctica to quantify prey concentrating ocean features, and describe their ecological significance by comparing them to biological observations. Transport features quantified by CSA have the potential to be transport hubs, delivering and concentrating constant supplies of plankton. Results have the potential to inform the identification of prey concentrating features in larger, more complex food webs, and expand the use of coastal HFR data.
 Second Prize (Certificate and $2000)
Second Prize (Certificate and $2000)
Cameron Smith (virtual), US Naval Academy, USA
Design and Development of a Bioinspired Lateral Line Sensor for Uncrewed Underwater Vehicle Operations
Abstract—Fish have developed unique anatomies and capabilities to thrive in a dynamic undersea environment. One such biological feature is a lateral line organ, which allows a fish to detect skin-surface pressure differences caused by the wakes of upstream objects. By understanding its incident and surrounding fluid flow-field, a fish can swim more efficiently. This paper presents the design and development of an engineered sensory system with similar capabilities to a natural lateral line. The artificial lateral line was constructed using an array of commercial off-the-shelf pressure sensors and an additively-manufactured housing. A series of experiments were performed in a recirculating water tunnel at the United States Naval Academy using a pair of upstream articulating hydrofoils, demonstrating the ability of the sensors to detect both flapping frequency and a distinct relationship between frequency and phase offset. These in-water trials broadly revealed the system’s potential to characterize vortex wakes in a manner similar to fish. Ultimately, the results demonstrate the functionality of a low-cost sensory system architecture capable of being integrated into an uncrewed underwater vehicle, significantly benefiting applied biomimetic research in the undersea domain.
 Third Prize (Certificate and $1000)
Third Prize (Certificate and $1000)
Derek Benham, Brigham Young University, USA
3D Reconstruction of Reefs using Autonomous Surface Vessels and an Analysis of Chain vs 3D Rugosity Measurement Robustness
Abstract—Coral reefs are at risk. To study and minimize the impacts of global warming, pollution, or land sediment disposition on the reef, regular and accurate measurements are needed to assess the coral’s health. We present a method of using surface vessels to autonomously collect GPS tagged images to be used in creating a 3D model of the reef which we tested in Molokai, Hawaii. We also discuss the shortcomings of chain rugosity measurements (the longtime standard for categorizing reef health) and how surface complexity measurements, a metric only obtained from creating 3D models from imagery are less subject to these flaws.
 Nadav Cohen (virtual), University of Haifa, Israel
Nadav Cohen (virtual), University of Haifa, Israel
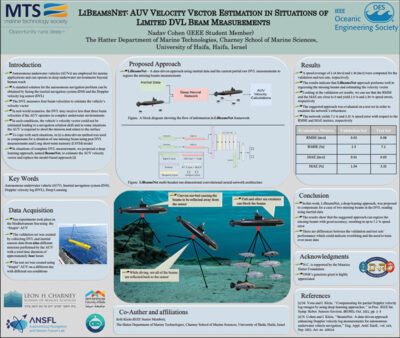
LiBeamsNet: AUV Velocity Vector Estimation in Situations of Limited DVL Beam Measurements
Abstract—Autonomous underwater vehicles (AUVs) are employed for marine applications and can operate in deep underwater environments beyond human reach. A standard solution for the autonomous navigation problem can be obtained by fusing the inertial navigation system and the Doppler velocity log sensor (DVL). The latter measures four beam velocities to estimate the vehicle’s velocity vector. In real-world scenarios, the DVL may receive less than three beam velocities if the AUV operates in complex underwater environments. In such conditions, the vehicle’s velocity vector could not be estimated leading to a navigation solution drift and in some situations the AUV is required to abort the mission and return to the surface. To circumvent such a situation, in this paper we propose a deep learning framework, LiBeamsNet, that utilizes the inertial data and the partial beam velocities to regress the missing beams in two missing beams scenarios. Once all the beams are obtained, the vehicle’s velocity vector can be estimated. The approach performance was validated by sea experiments in the Mediterranean Sea. The results show up to 7.2 % speed error in the vehicle’s velocity vector estimation in a scenario that otherwise could not provide an estimate.
 Ethan Conley, Virginia Tech, USA
Ethan Conley, Virginia Tech, USA
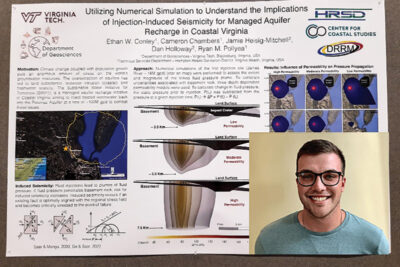
Utilizing Numerical Simulation to Understand the Implications of Injection-Induced Seismicity for Managed Aquifer Recharge in Coastal Virginia
Abstract—As demand for freshwater increases in coastal Virginia, overpumping of the Potomac Aquifer has led to accelerating land subsidence, declining groundwater levels, and saltwater intrusion. To slow these deleterious effects, the Hampton Roads Sanitation District is developing the Sustainable Water Initiative for Tomorrow (SWIFT) project to replenish the Potomac Aquifer through a network of up to five managed aquifer recharge facilities in southeast Virginia. Large-scale fluid injections into deep geologic formations have a well-documented history of causing earthquakes, particularly in the energy sector; however, there has yet to be a demonstrable connection between managed aquifer recharge and injection-induced seismicity. Nevertheless, the SWIFT project is unique because target aquifer lies unconformably above the crystalline basement rock, where pre-existing basement faults may occur. Although the Virginia Coastal Plain does not generally experience natural earthquakes, fluid injections from large scale aquifer recharge may produce sufficient fluid pressure to induce seismicity, if critically-stressed and optimally oriented faults exist within the deep basement rock below the Virginia Coastal Plain. While the presence of such faults remains unknown, this study is designed to estimate the extent and depth to which injection-induced pressure transients may travel during MAR injections at the James River Wastewater Treatment Plant, which is scheduled to come online in 2026. Results from numerical simulation show that (i) injection-induced pressure transients in excess of 40 kPa may reach depths of ∼3 km and (ii) basement rock permeability largely imposes first-order control on the depth and extent of injection-induced fluid pressure propagation.
 Yutian Ding, The University of Tokyo, Japan
Yutian Ding, The University of Tokyo, Japan
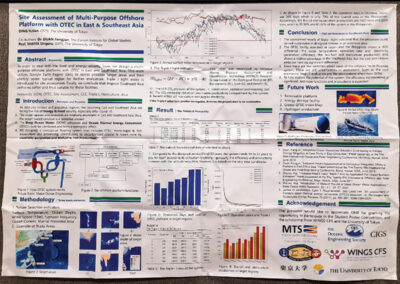
Site assessment of multi-purpose offshore platform with OTEC in East and Southeast Asia
Abstract—In order to deal with the food and energy security issue, we design a multi-purpose offshore platforms with OTEC in East and Southeast Asia. This work utilizes Google Earth Engine (GEE) to assess possible target areas and then identify seven typical region for further evaluation. Triple I light index is introduced for site assessment. Finally, we conclude that tropical Southeast Asia performs better and thus suitable for these facilities.
 Courtney Dreyfus, Rutgers University, USA
Courtney Dreyfus, Rutgers University, USA
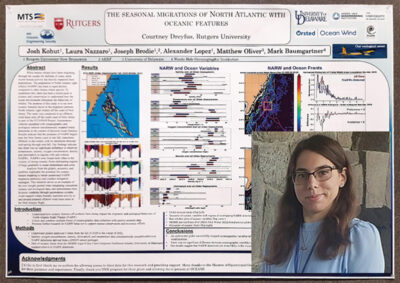
Aligning the seasonal migrations of North Atlantic Right Whales with oceanic features
Abstract—While baleen whales have been migrating through the oceans for millions of years, more recent human activity has heavily impacted their populations. The population of North Atlantic right whales (NARW) has been in rapid decline compared to other baleen whale species. To counteract this, there has been a recent push in science and conservation to understand how the ocean environment influences the behaviors of whales. The purpose of this study is to see how oceanic features factor in the migratory patterns North Atlantic right whales off the coast of New Jersey. The study was conducted in an offshore wind lease area off the south coast of New Jersey as part of the ECO-PAM Project. Autonomous vehicles equipped with oceanographic and ecological sensors simultaneously mapped whale detections in the context of physical ocean features. Results indicate that the presence of NARW begins near the New Jersey coast in late fall, transitions offshore in the winter, with no detections between mid-spring through mid-fall. Our findings indicate that there was no significant difference in observed temperature, salinity, oxygen concentration, density and chlorophyll in regions with and without NARWs. NARWs were found more often in the vicinity of strong cceanic fronts delineating regions of large gradients in ocean temperature and color.
Analysis from the gliders, acoustics, and satellites highlights the potential for oceanic feature mapping to better understand NARW migration pathways and conduct mitigation strategies. This research serves as an example of the new insight gained when integrating concurrent oceanic and ecological data, and demonstrates how dynamic mapping through autonomous systems could support whale-friendly maritime activity in and around planned offshore wind lease areas in the Mid Atlantic Bight.
 Elias Erstorp, KTH Royal Institute of Technology, Sweden
Elias Erstorp, KTH Royal Institute of Technology, Sweden
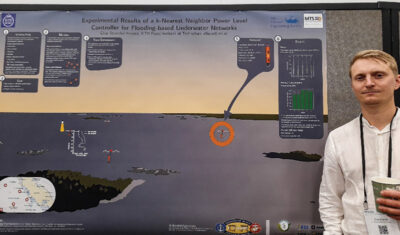
Experimental Results of a k-Nearest Neighbor Power Level Controller for Flooding-based Underwater Networks
Abstract—Systems of heterogeneous underwater vehicles and sensor platforms are being used in various applications. Although these systems are still deployed at a relatively small scale, rapid technological development is in progress, and a significant impact of these systems is approaching. To a large degree, this is driven by a desire to utilize the oceans for sustainable food, energy, and environmental monitoring. Vehicles and platforms in these systems communicate wirelessly using acoustic signals due to the limited range of radio signals. To form underwater networks, the systems must communicate at the same frequency range and use common network protocols. Flooding-type network protocols are easy to implement, robust, and can serve as a baseline for heterogeneous networks. Here, a transmission power controller used in conjunction with a flooding protocol is examined. Results show a great reduction in transmission power and potential for significant energy savings.
 Sabna Hassan, Curtin University, Australia
Sabna Hassan, Curtin University, Australia
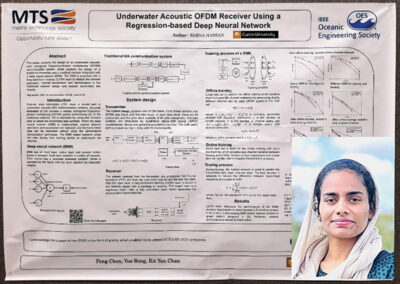
Underwater Acoustic OFDM Receiver Using a Regression-based Deep Neural Network
Abstract—The orthogonal frequency-division multiplexing (OFDM) technology is a promising technology for many scenarios in underwater acoustic (UA) communications. This paper presents the design of a UA OFDM communication system, which explains the design of a traditional transmitter and a modified receiver integrated with a deep neural network (DNN). The DNN is proposed to replace the channel estimation, channel equalization and demodulation in the traditional receiver design and recover transmitted bits directly. The regression-based DNN consists of a long short-term memory (LSTM) layer. The training stage of the DNN can be either offline or online. During the testing stage, the trained network is used to recover online transmitted data directly. The offline training method is performed with maximum possible channel scenarios with a large data set. Meanwhile, the online training uses a small data set with short training time. The designed regression-based DNN receiver achieves a better performance compared to previously developed DNN receivers and the traditional receiver which is implemented with the least-squares (LS) estimator.
 Alexander Hatfield, Old Dominion University, USA
Alexander Hatfield, Old Dominion University, USA
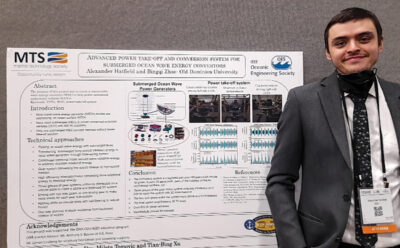
Advanced Power Take-off and Conversion System for Submerged Ocean Wave Energy Convertors
Abstract—Today, unmanned undersea vehicles (UUVs) are taking an increased number of U.S. Navy mission roles. These vehicles will most likely be launched within a large distance from its assigned mission area. At times it may be desirable for these vehicles to loiter and await tasking. One of the major limiting factors for these UUV activities is endurance. Currently, UUVs are limited to the range provided by one single battery charge. However, a reliable and renewable power resource to charge the battery trays is a big challenge issue for the U.S. Navy. Which is why the U.S. Navy is interested in developing a renewable seabed power source that will allow UUVs to charge while deployed and remain undetected. UUVs are generally far away from terrestrial power with no power source available to charge a battery. A covert, submerged, renewable power source that utilizes wave energy, wind, solar, temperature differences, etc., to charge a submerged power center is highly desirable. Working with the Navy Science Advisor, we obtained the requirements for a typical UUVs battery, which includes i) the high-charge-rate for two battery trays has about ~11kWh, ii) takes about 7 hours to charge from 0 to 100 percent, iii) the charge voltage is 32VDC, iv) and the power charge station is preferably located on ocean bed, which is typically under 60 meters of ocean water surface.
 Joseph Hirsch, SINTEF AS, Norway
Joseph Hirsch, SINTEF AS, Norway
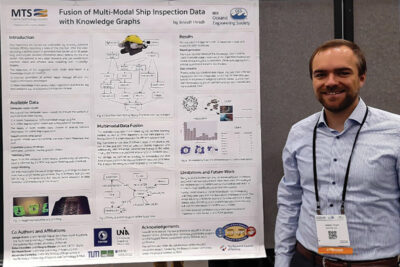
Fusion of Multi-Modal Underwater Ship Inspection Data with Knowledge Graphs
Abstract—With recent advances in underwater inspections of ships with remote sensing technologies the need for automated data annotations and analysis becomes apparent. During underwater ship inspections, various data such as video, positioning information, and other telemetry data are collected and combined with the results of computer vision models. The variability in the modalities of data makes the automatic analysis across multiple data sources challenging. We propose the use of a Knowledge Graph in combination with industry standards in the ship inspection domain for the taxonomy. This enables automated data analysis for underwater ship inspection videos which is the requirement for different downstream use cases. In this work, we demonstrate the applicability of our approach on 12 ship inspections in two downstream tasks. First, we aim at supporting a detailed ship status report generation, and second, we demonstrate big data analytics for several inspections. We use the fused data to compare different ships by identifying patterns in the findings aided by computer vision algorithms.
 Jessica Horowitz, Massachusetts Institute of Technology, USA
Jessica Horowitz, Massachusetts Institute of Technology, USA
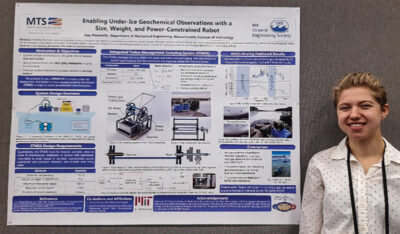
Enabling Under-Ice Geochemical Observations with A Size, Weight, and Power-Constrained Robot
Abstract—Estimates of greenhouse gas emissions from Arctic estuarine environments are dominated by in situ summer-time ice-free dissolved gas measurements due to the logistical ease of performing field observations in these conditions. Recent evidence in coastal Arctic environments, however, has demonstrated that dissolved methane (CH4) and carbon dioxide (CO2) are strongly seasonally variable, and at least one significant gas ventilation event occurs during the spring freshet. Whether the Arctic serves as a source or sink of greenhouse emissions has significant implications on modeling climate change and its feedback mechanisms. To enable higher resolution spatiotemporal measurements of dissolved gases in typically undersampled conditions, remotely operated vehicles (ROVs) can be used to extract near continuous water samples below ice before and during the spring freshet. Here, we present a size, weight, and power-constrained (SWAP) underwater vehicle (UV) and novel geochemical sampling system suitable for taking under-ice geochemical observations and demonstrate the proposed system in a field-analog setting for Arctic estuarine studies.
 Rebecca Horwitz, Carleton College and Rutgers University, USA
Rebecca Horwitz, Carleton College and Rutgers University, USA
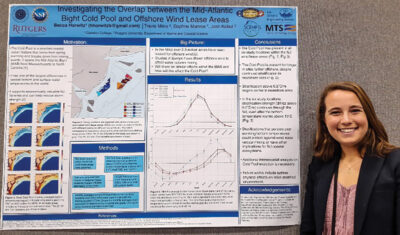
Investigating the Overlap Between the Mid-Atlantic Bight Cold Pool and Proposed Offshore Wind Lease Areas
Abstract—The Mid-Atlantic Cold Pool is a seasonal mass of cold bottom water that extends throughout the Mid-Atlantic Bight (MAB). The Cold Pool forms from rapid surface warming in the spring and dissipates in the fall due to mixing events such as storms. The Cold Pool supports coastal ecosystems and economically valuable commercial and recreational fisheries along the MAB. Offshore wind energy has been rapidly developing within the MAB in recent years. Studies in Europe demonstrate that existing WEAs can impact seasonal stratification; however, there is limited information on how MAB wind development will affect the Cold Pool. Seasonal overlap between the Cold Pool and wind lease areas in the Southern New York Bight along coastal New Jersey was evaluated using a data assimilative ocean model. Results highlight overlap periods as well as a thermal gradient that persists after bottom temperatures warm above the threshold typically used to identify the Cold Pool. These results also support cross-shelf variability in Cold Pool evolution. This work highlights the need for more focused ocean modeling studies and observations of the Cold Pool and MAB wind lease area overlap.
 Hannah Kurdila, Penn State University, USA
Hannah Kurdila, Penn State University, USA
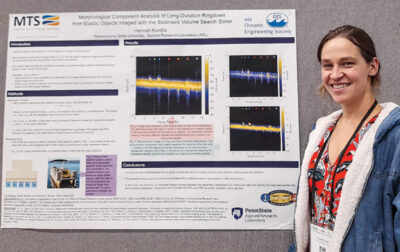
Morphological Component Analysis of Long Duration Ringdown from Elastic Objects Imaged with Sediment Volume Search Sonar
Abstract—A common problem in signal processing is decomposing a signal comprised of several components into its constituent parts. This paper uses Morphological Component Analysis (MCA) to decompose experimentally collected Sediment Volume Search Sonar (SVSS) data into short-duration and long-duration components. The SVSS is a synthetic aperture sonar (SAS) system designed for detection of ordnance at shallow water depths. In the implementation of MCA, Enveloped Sinusoid Parseval (ESP) frames are used to represent the signal components with sparse representations obtained via the Split Augmented Lagrangian Shrinkage Algorithm (SALSA). Ultimately, we are able to isolate late-time ringing of metallic objects both on top of and buried beneath sediment and generate sonar imagery using the two separated components to demonstrate the isolation.
 Jinsong Lin (virtual), First Institute of Oceanography, China
Jinsong Lin (virtual), First Institute of Oceanography, China
CYGNSS Sea Surface Heat Flux Product Validation and its Applicability
Abstract—Sea surface heat flux is an important factor for studying ocean-atmosphere interaction. The heat flux product developed based on the Cyclone Global Navigation Satellite System (CYGNSS) wind speed provides a new platform for studying sea surface heat flux under extreme sea conditions. The wind speed and heat flux measured by the Kuroshio Extension Observatory (KEO) and Tropical Atmosphere Ocean (TAO) buoys were employed as reference data to evaluate the accuracy and applicability of CYGNSS heat flux products in the northwestern and equatorial Pacific Ocean. The results show that the heat flux of CYGNSS is in good agreement with the measured heat flux of the KEO, and the correlation coefficient is up to 0.90. There is a large error and weak correlation between CYGNSS and TAO array, which may be due to the use of reanalysis data in TAO heat flux. The effect of 25 km spatial matching statistical parameters is better than that of 50 km spatial matching. The effectiveness of the CYGNSS heat flux product in the mid-latitude sea area was verified. In the absence of field observation data in the low latitude sea area, the heat flux product has a certain reference significance.
 Tiago Matos, University of Minho, Portugal
Tiago Matos, University of Minho, Portugal
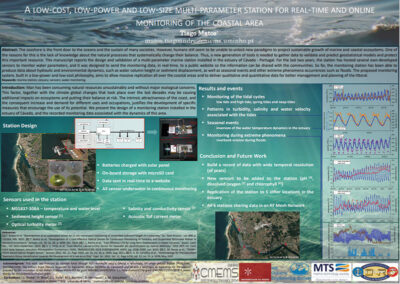
A low-cost, low-power and low-size multi-parameter station for real-time and online monitoring of the coastal area
Abstract—The seashore is the front door to the oceans and the sustain of many societies. However, humans still seem to be unable to unlock new paradigms to project sustainable growth of marine and coastal ecosystems. One of the reasons for this is the lack of knowledge about the natural processes that systematically change their balance. Thus, a new generation of tools is needed to gather data to validate and predict geostatistical models and protect this important resource. This manuscript reports the design and validation of a multi-parameter marine station installed in the estuary of Cávado – Portugal. For the last two years, the station has hosted several own-developed sensors to monitor water parameters, and it was designed to send the monitoring data, in real-time, to a public website so the information can be shared with the communities. So far, the monitoring station has been able to produce data about hydraulic and environmental dynamics, such as water column height or sediment displacement, as well as seasonal events and other extreme phenomena occurrences such as floods. The proposed monitoring system, built in a low-power and low-cost philosophy, aims to allow massive replication all over the coastal areas and to deliver qualitative and quantitative data for better management and planning of the littoral.
 António Oliveira, Faculdade de Engenharia da Universidade do Porto, Portugal
António Oliveira, Faculdade de Engenharia da Universidade do Porto, Portugal
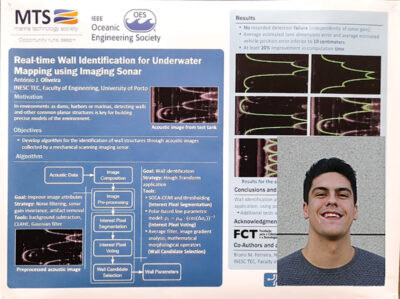
Real-time Wall Identification for Underwater Mapping using Imaging Sonar
Abstract—Wall and other planar structures are common in environments as harbors, marinas, or dams. In this paper we introduce an algorithm aimed at the identification of these structures through acoustic images retrieved from an imaging sonar, building on an application of the Hough Transform algorithm. We employ a polar-based line parametric model for improved computational efficiency and further adapt the core Hough Transform blocks to the characteristics of acoustic imaging. The developed solution was subjected to experimental tests employing acoustic data acquired in a water tank, from different viewpoints and under different sonar gain configurations.
 Jeygopi Panisilvam, University of Melbourne, Australia
Jeygopi Panisilvam, University of Melbourne, Australia
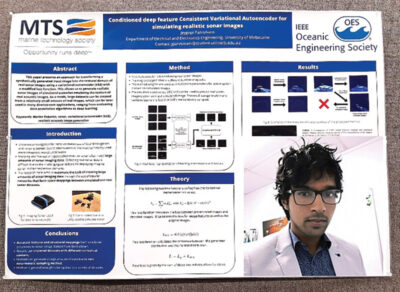
Conditioned deep feature consistent variational autoencoder for simulating realistic sonar images
Abstract—Multibeam imaging sonar is one of the primary sensors for underwater navigation with uncrewed underwater vehicles (UUVs) due to the robustness to turbidity and variable lighting conditions that limit the applicability of standard cameras. However, the operating principles and noise models of real sensors make imaging sonar challenging to accurately simulate, and acquiring real images experimentally is difficult and costly. This paper presents an approach for transforming a synthetically generated input image into the textural domain of real sonar images using a variational autoencoder (VAE) with a modified loss function. This allows us to generate realistic sonar images of simulated scenarios emulating the texture of real acoustic images. As a result, large datasets can be created from a relatively small amount of real images, which can be later used in many downstream applications, ranging from evaluating data association algorithms to deep learning. The method was evaluated using an isolated real and simulated dataset that trained a separate convolutional neural network (CNN) to discern between images in the sonar domain and simulated images. The VAE has several advantages over a compared Cycle Consistent Generative Adversarial Network (CycleGAN) approach, including more texturally accurate generated images, and allowing for more variation in generated images.
 Evan Robertson, Clemson University, USA
Evan Robertson, Clemson University, USA
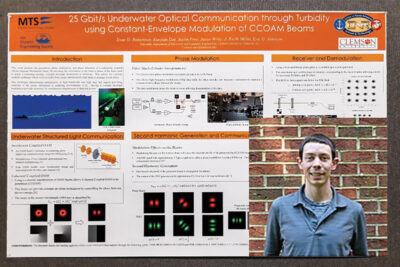
25 Gbit/s Underwater Optical Communication through Turbidity using Constant-Envelope Modulation of Orbital Angular Momentum Modes
Abstract—In this paper, we demonstrate an underwater optical communication link using an Ince-Gaussian beam which is generated by pumping a nonlinear crystal with a coherently coupled Orbital Angular Momentum (CCOAM) beam. By modulating data on the relative phase of the pump beam, a power scalable underwater communication link at 25 Gbit/s is experimentally verified for turbid coastal conditions.
 Cesar Rojas, Florida International University, USA
Cesar Rojas, Florida International University, USA
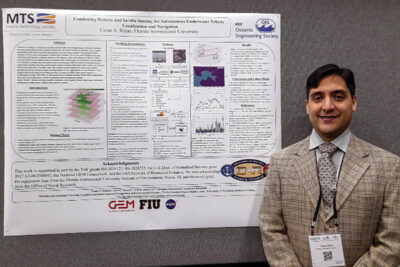
Combining Remote and In-situ Sensing for Autonomous Underwater Vehicle Localization and Navigation
Abstract—Scientists continue to study the red tide and fish-kill events happening in Florida. Machine learning applications using remote sensing data on coastal waters to monitor water quality parameters and detect harmful algal blooms are also being studied. Unmanned Surface Vehicles (USVs) and Autonomous Underwater Vehicles (AUVs) are often deployed on data collection and disaster response missions. To enhance study and mitigation efforts, robots must be able to use available data to navigate these underwater environments. In this study, we compute a satellite-derived underwater environment (SDUE) model by implementing a supervised machine learning model where remote sensing reflectance (Rrs) indices are labeled with in-situ data they correlate with. The models predict bathymetry and water quality parameters given a recent remote sensing image. In our experiment, we use Sentinel-2 (S2) images and in-situ data of the Biscayne Bay to create an SDUE that can be used as a Chlorophyll-a map. The SDUE is then used in an Extended Kalman Filter (EKF) application that solves an underwater vehicle localization and navigation problem.
 Ibrahim Salman, University of South Carolina, USA
Ibrahim Salman, University of South Carolina, USA
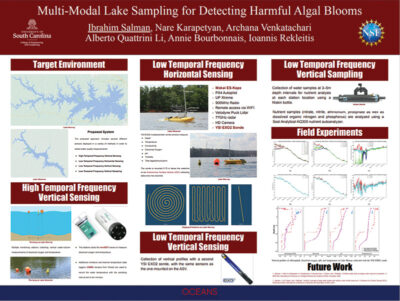
Multi-Modal Lake Sampling for Detecting Harmful Algal Blooms
Abstract—In this paper, we present a system for measuring water quality, with a focus on detecting and predicting Harmful Cyanobacterial Blooms (HCBs). The proposed approach includes stationary multi-sensor stations, Autonomous Surface Vehicles (ASVs) collecting water quality data, and manual deployments of vertical water sampling together with vertical water quality sensor data collection, in order to monitor the health of the lake and the progress of different types of algal blooms. Traditional water monitoring is performed by manual sampling, which is limited both in the spatial and the temporal domain. The proposed method will expand the range of measurements while reducing the cost. Human sampling is still included in order to provide a base of comparison and ground truth for the automated measurements. In addition, the collected data, over multiple years, will be analyzed to infer correlations between the different measured parameters and the presence of blooms. A detailed description of the proposed system is presented together with data collected during our first sampling season.
 Russell Shomberg, University of Rhode Island, USA
Russell Shomberg, University of Rhode Island, USA
Feasibility of a Near Surface Wave Powered Profiling Float for Extended Fully Submerged Autonomous Deployments
Abstract—We propose a float capable of harvesting wave energy while fully submerged. The proposed design could theoretically operate indefinitely without ever breaching the surface. We developed and validated design guidelines for the proposed float through a combination and tank testing simulation. These design insights could be employed to build an operational float.
 Andre Hendricks (virtual), Dalhousie University, Canada
Andre Hendricks (virtual), Dalhousie University, Canada
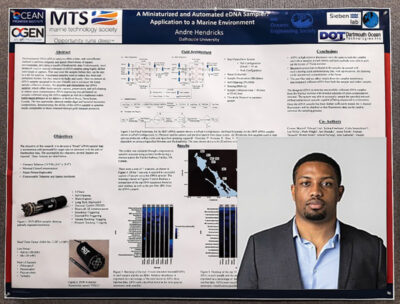
A Miniaturized and Automated eDNA Sampler with Fluorometer Utilization Applied to a Marine Environment
Abstract—Environmental DNA (eDNA) analysis offers a time- and cost-efficient method to perform temporal and spatial observations of aquatic environments, providing a wealth of biodiversity data. Unfortunately, most protocols require manual collection of eDNA samples using highly skilled individuals to capture, filter and store the samples before they can be sent to a lab for analysis. Automated samplers exist to reduce this front-end collection burden, but they tend to be bulky and costly. Here we describe an eDNA sampler designed to be user-friendly and to automate the entire sample collection process. We describe and characterize our eDNA sampler, which offers multi-sample capture, preservation, and self cleaning to reduce cross contamination. DNA sequencing was performed on samples collected using the eDNA sampler as well as a traditional niskin bottle-based protocol at six stations in Bedford Basin, Nova Scotia, Canada. The two approaches showed similar algal and bacterial taxonomic compositions, demonstrating the ability of the eDNA sampler to generate results comparable to those obtained through gold-standard protocols.
 Alberto Topini, University of Florence, Italy
Alberto Topini, University of Florence, Italy
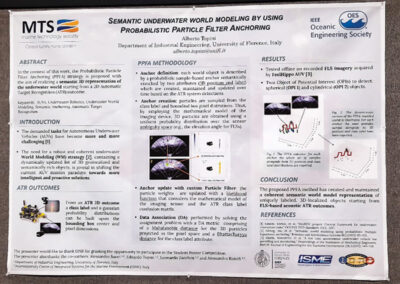
Semantic underwater world modeling by using Probabilistic Particle Filter Anchoring
Abstract—Creating an accurate world model of the scenario where an Autonomous Underwater Vehicle (AUV) is navigating can be considered a crucial stage for understanding the surrounding environment. As a result, the targets detected by a cutting-edge Automatic Target Recognition (ATR) architecture alongside their localized positions, must be handled, selected and filtered to get a symbolic representation of the underwater context. Even though the specific World Modeling (WM) architecture may vary, current WM methodologies usually rely on the 3D localization knowledge of the detected target by introducing a not-negligible constraint. Motivated by the aforementioned considerations, a novel Probabilistic Particle Filter Anchoring (PPFA) approach has been developed. Starting from ATR 2D results, the PPFA methodology aims at providing a semantic 3D representation of the subsea environment by merging the upsides of both Data Association (DA) and object tracking, handled by a custom designed Particle Filter (PF) with resampling.
 Madelyn Veurink, Michigan Technological University, USA
Madelyn Veurink, Michigan Technological University, USA
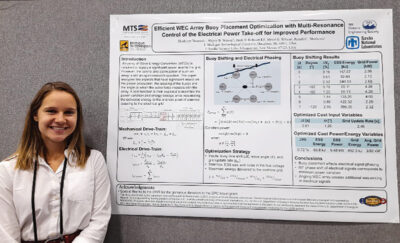
Efficient WEC Array Buoy Placement Optimization with Multi-Resonance Control of the Electrical Power Take-off for Improved Performance
Abstract—An array of Wave Energy Converters (WEC) is required to supply a significant power level to the grid. However, the control and optimization of such an array is still an open research question. This paper analyzes two aspects that have a significant impact on the power production. First the spacing of the buoys in a WEC array will be analyzed to determine the optimal shift between the buoys in an array. Then the wave force interacting with the buoys will be angled to create additional sequencing between the electrical signals. A cost function is proposed to minimize the power variation and energy storage while maximizing the delivered energy to the onshore point of common coupling to the electrical grid.
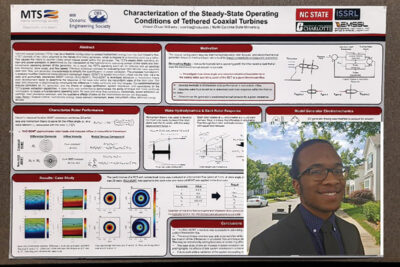 Vinson Williams, North Carolina State University, USA
Vinson Williams, North Carolina State University, USA
Characterization of the Steady-State Operating Conditions of Tethered Coaxial Turbines
Abstract—Tethered coaxial turbines (TCTs) may be a feasible configuration to extract hydrokinetic energy from the Gulf Stream’s flow. A TCT consists of two rotors attached to the halves of a rotary generator, which is moored to a mounting point via a tether. Flow causes the rotors to counter-rotate which induce power within the generator. The TCT’s steady-state operating domain and power extraction is determined by the intersection of the hydrodynamic operating domain of the rotors and electromechanic operating domain of the generator. As a result, the TCT’s operating point can be selected with an electrical load resistance, skew angle, and flow speed. Previous analytical methods for evaluating dual rotor devices have assumed ideal rotor, flow, and generator characteristics to simplify the quantification of power extraction. The proposed hydrodynamic analysis modifies traditional blade-element momentum theory (BEMT) to accept nonuniform inflow into the rotor, via a radially and azimuthally discretized BEMT method (RAD-BEMT). RAD-BEMT is leveraged alongside a momentum theory wake development factor to determine the response of the back rotor within the nonuniform wake of the front rotor. The back rotor response is determined by minimizing the difference in mass continuity and rotor torques. Our electromechanical analysis considers an AC generator, and the effects of voltage rectification, system resistance, and capacitance on the TCT’s power extraction capabilities. A case study was performed to demonstrate the ability of torque and mass continuity minimization to locate a hydrodynamic operating point, for axial and skew flow conditions. Additionally, power extraction capabilities, load resistance selection, and the qualitative effects of skew on the minimization domain are discussed.
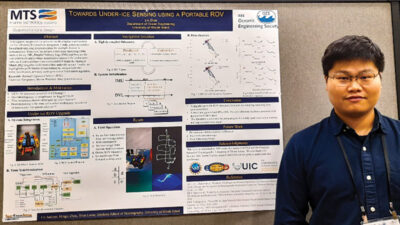 Lin Zhao, University of Rhode Island, USA
Lin Zhao, University of Rhode Island, USA
Towards Under-ice Sensing using a Portable ROV
Abstract—Unmanned Underwater Vehicles (UUVs) have a promising future to explore the polar regions. In this paper, we present our progress on developing a self-contain inertial odometry for under-ice navigation. Firstly, a microcontroller-based hardware time synchronization for multiple devices is demonstrated. Moreover, we present a new IMU, Doppler Velocity Log (DVL) and Pressure dead-reckoning (DR) for state estimation and a robust initialization approach for underwater vehciels. Field trials have been conducted in Utqiagvik, Alaska in March 2022 to gather multi-sensor data under the sea ice. In this paper, we highlight the performance of our method by comparing to the robot localization algorithm, a widely used open-source localization algorithm.
 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.