Shyam Madhusudhana, OES Student Poster Competition Chair
On-site photographs by Stan Chamberlain
A flagship event of the MTS/OES OCEANS conferences is the Student Poster Competition (SPC), which is open to undergraduate and graduate students from colleges and universities around the world. The SPC was envisioned and created by Col. Norman Miller and was first implemented at the Seattle OCEANS conference in 1989. It has been a feature of OCEANS conferences ever since. From the pool of aspiring applicants, typically 15-20 students are selected to participate in the Competition, based on reviews (two stages) of their abstracts. The selected students get an opportunity to present, at the OCEANS conference, a poster describing their work, with their travel expenses covered.
The fusing together of this year’s Porto and San Diego OCEANS conferences resulted in a single SPC event. The pandemic-induced lockdowns and travel restrictions around the globe had forced last year’s OCEANS conference to be held as an entirely virtual event. In contrast, this year’s event was held in a hybrid format allowing participants the option to either attend in-person or participate virtually. The final set of participants included 14 virtual and 5 in-person participants.
The hybrid format brought its own challenges to conducting the SPC. The in-person participants presented their posters in the traditional form, while the virtual participants’ presentations and interactions with the judges were arranged to be held over a teleconference call – the students presented their posters virtually, one after the other, to the cohort of judges that were congregated in a hall at the conference venue. I would like to congratulate the Local Organizing Committee (LOC) for their proactive efforts in ensuring that the event was conducted at the desired expectation levels. The LOC SPC Chair, Vladimir Djapic, deserves a special mention for his commendable efforts despite having had to relocate to Europe during the run-up to the conference. We had a total of 8 volunteers that offered to serve as judges for the Competition; their efforts and contributions to the event’s success are much appreciated. I also take this opportunity to thank the sponsors—Office of Naval Research and Schmidt Ocean Institute—for their support of this year’s SPC and also for their continued support for OCEANS conferences in general.
The list of participants (including the prize winners) together with their affiliation, poster title and an abstract of their poster are given below. Apologies to the virtual participants whose presentations’ screenshots aren’t included. We couldn’t obtain the same due to IT issues during the virtual session.

 First Prize, Norman Miller Award (Certificate & $3000 prize)
First Prize, Norman Miller Award (Certificate & $3000 prize)
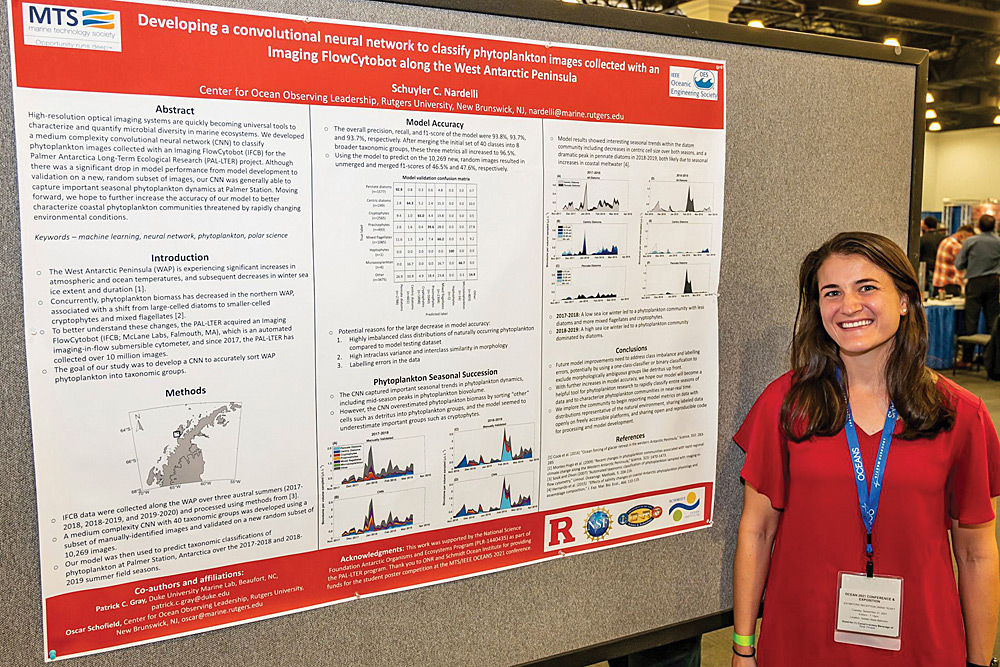
Schuyler Nardelli, Rutgers University, USA
Developing a convolutional neural network to classify phytoplankton images collected with an Imaging FlowCytobot along the West Antarctic Peninsula
Abstract—High-resolution optical imaging systems are quickly becoming universal tools to characterize and quantify microbial diversity in marine ecosystems. Automated detection systems such as convolutional neural networks (CNN) are often developed to identify the immense number of images collected. The goal of our study was to develop a CNN to classify phytoplankton images collected with an Imaging FlowCytobot for the Palmer Antarctica Long-Term Ecological Research project. A medium complexity CNN was developed using a subset of manually-identified images, resulting in an overall accuracy, recall, and f1-score of 93.8%, 93.7%, and 93.7%, respectively. The f1-score dropped to 46.5% when tested on a new random subset of 10,269 images, likely due to highly imbalanced class distributions, high intraclass variance, and interclass morphological similarities of cells in naturally occurring phytoplankton assemblages. Our model was then used
to predict taxonomic classifications of phytoplankton at Palmer Station, Antarctica over 2017-2018 and 2018-2019 summer field seasons. The CNN was generally able to capture important seasonal dynamics such as the shift from large centric diatoms to small pennate diatoms in both seasons, which is thought to be driven by increases in glacial meltwater from January to March. Moving forward, we hope to further increase the accuracy of our model to better characterize coastal phytoplankton communities threatened by rapidly changing environmental conditions.
 Second Prize (Certificate and $2000 prize)
Second Prize (Certificate and $2000 prize)
Isaac Gerg, Penn State University, USA
A learnable image compression scheme for synthetic aperture sonar imagery
Abstract—Synthetic aperture sonar (SAS) is an imaging modality which produces high and constant resolution images of the seafloor. These sonars are often mounted to a unmanned underwater vehicle (UUV) to autonomously collect imagery of a prescribed survey area. While a survey is underway, UUV communications back to the operator are often limited due to the use of a low-bandwidth acoustic communications (ACOMMS) channel. Because of this, high-quality SAS imagery is rarely sent over this link due to the lack of an efficient compression scheme to send such information. Creating an efficient SAS image compression scheme provides at least two operational benefits: (1) image chips beamformed and tagged by onboard processing algorithms can be quickly communicated to operators while a survey is ongoing, and (2) cooperative UUVs can exchange salient image chips among themselves to reconcile position ambiguity and obtain a shared reference frame. In this work we propose a learned image compression scheme for SAS imagery using deep neural networks (DNNs). DNNs have already been applied to the image compression problem but almost exclusively for optical imagery. We highlight some important differences between SAS imagery and optical imagery which prevents the simple application of off-the-shelf (OTS) methods like JPEG and WebP to SAS imagery. We propose an image compression scheme which specifically addresses the domain-specific properties of SAS imagery to obtain useful image compression performance on a real-world SAS dataset. We show that we can reduce the bitrate by up to thirty-five percent while still maintaining the same perceptual image quality as OTS codecs.
Third Prize (Certificate and $1000 prize)
Diogo Teixeira, University of Porto – LSTS, Portugal
3D tracking of a river plume front with an AUV
Abstract—The problem of the concurrent tracking and mapping of a river plume front with an autonomous underwater vehicle (AUV) is formulated and addressed in the framework of an interdisciplinary approach building on experience in robotics and oceanographic field studies. The problem formulation is targeted at the scientific study of the processes by which the river and the ocean interact. The approach extends previous work in AUV plume tracking to the simultaneous tracking and mapping under different ocean and meteorological conditions. This is done with the help of parameterizable motion control algorithms to enable adaptation to these time-varying conditions. The approach is evaluated in simulation with the help of a high-resolution hydrodynamic model. The test plan covers over 300 test cases exercising the most representative combinations of the ocean and meteorological conditions. Lessons learned and future operational deployments are discussed in the conclusions.
Xinwei Chen, Memorial University of Newfoundland, Canada
A spatial-temporal ensemble network for estimating wave height from X-band marine radar image sequences
Abstract—A spatial-temporal ensemble network is proposed to estimate significant wave heights (SWHs) from X-band marine radar image sequences. After image subarea selection, a 1024-dimension deep spatial feature vector is first extracted from each radar image using deep convolutional layers obtained from GoogLeNet. The temporal behavior of each radar image sequence can be analyzed by inputting the spatial feature vector sequence into a recurrent neural network (RNN) consisting of gated recurrent units (GRUs), followed by the regression layers that generate the estimated SWH. The network is trained using shipborne marine radar data collected during a sea trial, while simultaneous buoy measurements are used as ground truths for calibration and performance evaluation. Compared to the traditional signal-to-noise (SNR)-based method, the proposed network reduces the root mean square error by 0.35 m and 0.36 m for image sequences collected under rainless and rainy conditions, respectively.
 Blake Cole, Massachusetts Institute of Technology, USA
Blake Cole, Massachusetts Institute of Technology, USA
AIS-based collision avoidance in MOOS-IvP using a geodetic unscented Kalman filter
Abstract—This paper describes the design and implementation of a low-cost collision avoidance system, designed primarily for use on small and medium-sized autonomous surface vehicles (ASVs). The proposed methodology leverages real-time information broadcast via the Automatic Information System (AIS) messaging protocol, in order to estimate the position, speed, and heading of nearby vessels. The state of each target vessel is recursively estimated in geodetic coordinates using an Unscented Kalman Filter (UKF). Once identified, each vessel is avoided in accordance with the International Regulations for Preventing Collisions at Sea (COLREGs). This capability is enabled by MOOS-IvP, a behavior-based autonomy middleware that is able to make navigation decisions by weighing the relative importance of multiple competing objectives. For the purposes of collision avoidance, each target vessel produces a two-dimensional objective function which increases the cost of heading and speed combinations that will result in a collision or near-miss event. However, the primary mission behaviors remain active, allowing the IvP solver to choose an optimal combination of vessel speed and heading which drive the vehicle toward a desired state while simultaneously minimizing the risk of collision. It is shown through field testing that the proposed framework is an effective, robust means of collision avoidance.
Diogo Duarte, INESC TEC – Faculdade de Engenharia da Universidade do Porto, Portugal
Multiple vessel detection and tracking in harsh maritime environments
Abstract—Recently, research concerning the navigation of Autonomous Surface Vehicles (ASVs) has been increasing. However, a big scale implementation of these vessels is still held back by a plethora of challenges such as multi-object tracking. This article presents the development of a tracking model through transfer learning techniques, based on referenced object trackers for urban scenarios. The work consisted in training a neural network through deep learning techniques, including data association and comparison of three different optimisers, Adadelta, Adam and SGD, determining the best hyper-parameters to maximise the training efficiency. The developed model achieved decent performance at tracking large vessels in the ocean, being successful even in harsh lighting conditions and lack of image focus.
 Elizaveta Dubrovinskaya, Universidad Carlos III Madrid, Spain
Elizaveta Dubrovinskaya, Universidad Carlos III Madrid, Spain
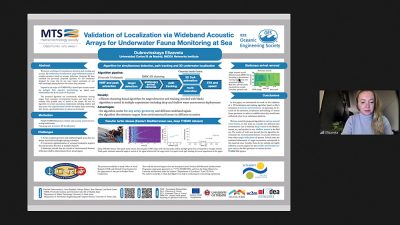
Validation of localization via wideband acoustic arrays for underwater fauna monitoring at sea
Abstract—We present a technique for simultaneous detection, path tracking and accurate 3D underwater localization using wideband arrays of complex geometry based on acoustic reflections clustering. We have extended our previously proposed algorithm for 3D localization designed for arrays that do not meet typical constraints of one half-wavelength spacing between the closest array elements. Inspired by the scope of SYMBIOSIS, a hybrid opto-acoustic system for pelagic fish species monitoring, we added more functionalities that fit the needs of the project.
The proposed algorithm can automatically discriminate moving targets from stationary environmental features and track them to estimate their possible time of arrival to the system. We test the algorithm in several autonomous deployments including shallow and deep water. The experimental results for marine fauna monitoring have shown a good performance in various environments.
Joana Fonseca, Royal Institute of Technology KTH, Sweden
Algal bloom front tracking using an unmanned surface vehicle: numerical experiments based on Baltic Sea data
Abstract—We consider the problem of tracking moving algal bloom fronts using an unmanned surface vehicle (USV) equipped with a sensor that measures the concentration of chlorophyll a. Chlorophyll a is a green pigment found in plants, and its concentration is an indicator of phytoplankton abundance. Our algal bloom front tracking mission consists of three stages: deployment, data collection, and front tracking. At the deployment stage, a satellite collects an image of the sea from which the location of the front, the reference value for the concentration at this front and, consequently, the appropriate initial position for the USV are determined. At the data collection stage, the USV collects data points to estimate the local algal gradient as it crosses the front. Finally, at the front tracking stage, an adaptive algorithm based on recursive least squares fitting using recent past sensor measures is executed. We evaluate the performance of the algorithm and its sensitivity to measurement noise through MATLAB simulations. We also present an implementation of the algorithm on the DUNE onboard software platform for marine robots and validate it using simulations with satellite model forecasts from Baltic sea data.
 Guy Gubnitsky, University of Haifa, Israel
Guy Gubnitsky, University of Haifa, Israel
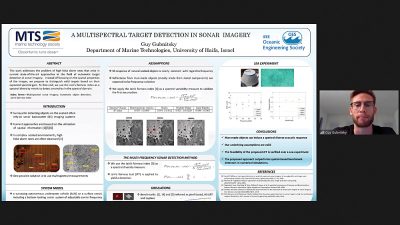
Multispectral target detection in sonar imagery
Abstract—Detection of underwater objects in sonar imagery is a key enabling technique, with applications ranging from mine hunting and seabed characterization to marine archaeology. Due to the non-homogeneity of the sonar imagery, the majority of detection approaches are geared towards detection of features in the spatial domain to identify anomalies in the seabed’s background. Yet, when the seabed is complex and includes rocks and sand ripples, spatial features are hard to discriminate, leading to high false alarm rates. With the aim of detecting man-made objects in complex environments, we utilize, as a detection metric, the expected spectral diversity of reflections to differentiate man-made objects’ reflections from the relatively flat frequency response of natural objects’ reflections, such as rocks. Our solution merges a set of preregistered sonar images, each of which are obtained at a different frequency band. Using the Jain’s fairness as a metric to evaluate the spectral diversity of a suspected object within a low or high resolution sonar imagery, respectively, our solution detects anomalies across the spectrum domain. We tested our algorithm over simulated data and over multispectral data obtained in a designated sea experiment. The results show that, compared to benchmark schemes, our approach obtains better performance in terms of the trade-off between false alarm rate and detection capability.
 Miguel Gutierrez Gaitan, CISTER/FEUP-ISEP, Portugal
Miguel Gutierrez Gaitan, CISTER/FEUP-ISEP, Portugal
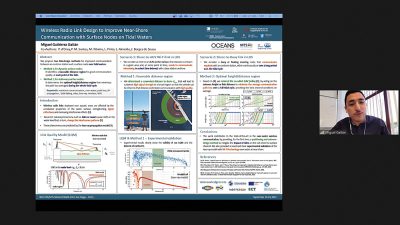
Wireless radio link design to improve near-shore communication with surface nodes on tidal waters
Abstract—Wireless radio links deployed over aquatic areas (e.g., sea, estuaries or harbors) are affected by the conductiveproperties of the water surface, strengthening signal reflections and increasing interference effects. Recurrent natural phenomena such as tides or waves cause shifts in the water level that, in turn, change the interference patterns and cause varying impairments to propagation over water surfaces. In this work, we aim at mitigating the detrimental impact of tides on the quality of a line-of-sight over-water link between an onshore station and a surface node, targeting mission data transfer scenarios. We consider different types of surface nodes, namely, autonomous underwater vehicles, unmanned surface vehicles and buoys, and we use WiFi technology in both 2.4 GHz and 5 GHz frequency bands. We propose two methods for link distance/height design: (i) identifying a proper Tx-Rx distance for improved link quality at each point of the tidal cycle; (ii) defining the height/distance that minimizes the path loss averaged during the whole tidal cycle. Experimental results clearly show the validity of our link quality model and the interest of method (i). Analytical results confirm method (ii) and show that it outperforms, in both frequency bands, the common practice of placing onshore antennas at the largest possible height and/or surface nodes at a short but arbitrary distance.
 Yuying Huang, McGill University, Canada
Yuying Huang, McGill University, Canada
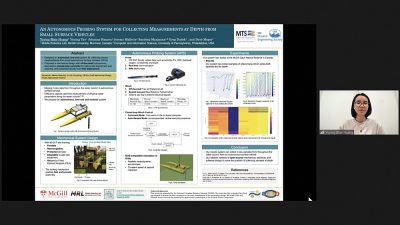
An autonomous probing system for collecting measurements at depth from small surface vehicles
Abstract—This paper presents the portable autonomous probing system (APS), a low-cost robotic design for collecting water quality measurements at targeted depths from an autonomous surface vehicle (ASV). This system fills an important, but often overlooked niche in marine sampling by enabling mobile sensor observations throughout the near-surface water column without the need for advanced underwater equipment. We present a probe delivery mechanism built with commercially available components and describe the corresponding winch control system. and data captured from this system in a field deployment. Finally, we discuss design trade-offs and present areas for future improvement. Project details are available on our website.
 Stéphane Imbert, IMT Atlantique, France
Stéphane Imbert, IMT Atlantique, France
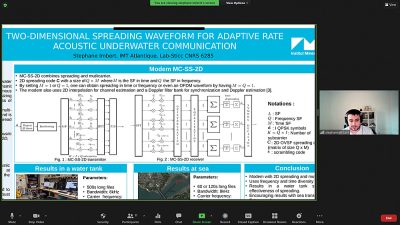
Two-dimensional spreading waveform for adaptive rate acoustic underwater communication
Abstract—Autonomous Underwater Vehicles (AUVs) are becoming a part of the ocean navigation ecosystem, and their applications deal with seafloor mapping, channel sounding, surveillance, submarine volcanism survey or mine warfare. During a mission, it is of great importance, through a reliable acoustic wireless communication link, that ships or surface buoys receive live data from an AUV and exchange information data with it. Furthermore, the communication range can vary during a mission. Thus, this paper addresses the challenging topic of designing a modem, to transmit information to an AUV, by emphasizing on the adaptivity and robustness of the link. The designed modem combines multi-carrier signal and 2D spreading and is called MC-SS-2D. A variable length spreading sequence combined with OFDM creates a flexible design that uses frequency diversity, time diversity and adds a processing gain to transmit at various distances. The modem was tested using rayleigh channels as well as experiments in a water tank and at sea using the IROMI platform.
 Rodney Itiki, University of North Carolina at Charlotte, USA
Rodney Itiki, University of North Carolina at Charlotte, USA
Method for estimation of marine hydro-kinetic power based on high-frequency radar data
Abstract—Marine Hydro-Kinetic (MHK) is renewable energy in the moving waters of the oceans. This research proposes a method for estimating the total MHK energy harvested by turbines spatially distributed in the ocean current. The MHK energy is variable in time and space. The method represented by an algorithm is implemented in MATLAB. It reads hourly measurements of seawater speed to estimate the power profile of the generated MHK farms. In the U.S., some speed measurements from high-frequency (HF) radars in the coastal areas are publicized on the internet by the National Oceanic and Atmospheric Administration (NOAA). The algorithm functionality is demonstrated in a case study with the NOAA radar measuring the seawater speed of the Gulf Strem off the coast of North Carolina. The peak value of the power profile sets a reference for the sizing of the MHK platform equipment and cabling. The algorithm is also useful for planning of renewables expansion of utility companies, selection of offshore site with high power output, techno-economic feasibility studies, and subsequent steps of engineering for a proposed MHK farm project. A comprehensive discussion of the implications of the proposed method for the natural, economic, social, and political environment paves the way for a myriad of potential multidisciplinary topics for future blue energy research.
Juhwan Kim, Pohang University of Science and Technology, Republic of Korea
Line laser mounted small agent ROV based 3D reconstruction method for precision underwater manipulation
Abstract—We proposed a line laser based 3D reconstruction method for small agent ROV to perform precision underwater manipulation. Perception of the surrounding environment underwater is essential for manipulation. Especially for small underwater vehicles with relatively limited and weak sensors, it is very difficult to perform 3D reconstruction and manipulation of objects underwater. This paper proposed that a small agent ROV attached with a line laser performs 3D object reconstruction by rotating motion. In general, a line laser scan can be performed when an actuator moves the line laser or when the vehicle’s position can be accurately known. However, in a small underwater vehicle without such an actuator and a high-performance navigation sensor, a laser scan cannot be performed smoothly. Therefore, we devised a method that performs a line laser scan by rotating the vehicle around the object only by detecting the target object with the camera. We confirmed that the target objects could be 3D scanned using the line laser scan simulator. In addition, we carried out experiments in the water tank, and 3D reconstruction of three target objects was possible. As a result, we showed that our line laser scan method could perform underwater 3D reconstruction of target objects even for small underwater vehicles with few sensors.
 Peeyush Kumar, University of Bonn, Germany
Peeyush Kumar, University of Bonn, Germany
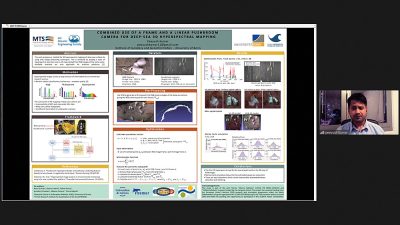
Combined use of a frame and a linear pushbroom camera for deep-sea 3D hyperspectral mapping
Abstract—Hyperspectral (HS) imaging produces an image of an object across a large range of the visible spectrum, and not just the primary colors (R, G, B) of conventional cameras. It can provide valuable information for object detection, analysis of materials and processes in environmental science in the deep-sea, especially for the study of benthic environments and pollution monitoring.
In this paper, we address the problem of camera calibration towards 3D hyperspectral mapping where GPS is not available, and the platform navigational sensors are not accurate enough to allow direct georeferencing of linear sensors, as is the case with traditional aerial platform methods.
Our approach presents a preliminary method for 3D hyper-spectral mapping that uses only image processing techniques to reduce reliance on GPS or navigation sensors. The method is based on the use of standard RGB camera coupled with the hyperspectral pushbroom camera. The main contribution is the implementation and preliminary testing of a method to relate the two cameras using image information alone.
The experiments presented in this paper analyze the estimation of relative orientation and time synchronization parameters for both cameras through experiments based on epipolar geometry and Monte-Carlo simulation. All methods are designed to work with real world data.
 Mathilde Letard, Paris Sciences Lettres University, France
Mathilde Letard, Paris Sciences Lettres University, France
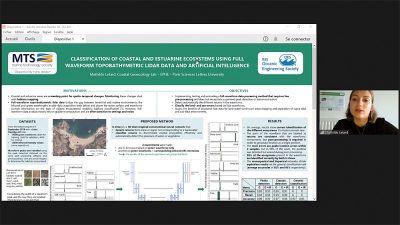
Classification of coastal and estuarine ecosystems using full-waveform topo-bathymetric lidar data and artificial intelligence
Abstract—Coastal and estuarine ecosystems are facing spatio-temporal changes and suffer from the effects of accelerated natural destructive processes due to climate change. Monitoring these areas is crucial to protect them and maintain the ecological balance of shorelines. In this context, full-waveform airborne topo-bathymetric lidar is a reliable tool to collect data seamlessly over land-water continuum zones, thanks to its dual wavelength configuration. It is therefore optimal for coastal habitats monitoring and mapping. However, lidar waveform processing often relies on peak detection and feature extraction that are difficult to configure and often sensitive to noise. In this article, we rather suggest not to rely on hand-crafted features by relying on U-time, a neural network inspired by the well-known UNet convolutional neural network, to identify peaks in waveforms and classify them to discriminate coastal ecosystems efficiently. The network is tested on green waveforms and we evaluate in addition the contribution of infrared intensities. Results show equivalent performances, and obtain over 92% of accuracy when accepting a 2 samples margin of error for peaks location, which does not impact heavily waveform analysis, considering usual peaks widths. Our study shows green waveforms alone allow habitats detection with a F-score of 94%, outperforming previous methods.
 Shashank Swaminathan, Franklin W. Olin College of Engineering, USA
Shashank Swaminathan, Franklin W. Olin College of Engineering, USA
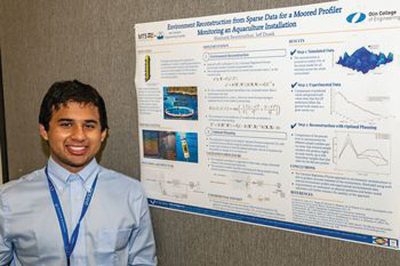
Optimal planning with uncertainty for a moored profiler monitoring an aquaculture installation
Abstract—There is burgeoning global demand for marine seafood, and one proposed approach to meeting this is expanding offshore farming practices. When developing such offshore aquaculture farms, it is critical to maintain the health and safety of both the food stock and the environment. To do so, there must be consistent and thorough monitoring of the installations, with data collected over large spatial and temporal ranges, spanning up to hundreds of meters deep for weeks at a time. We focus on using a moored automatic mobile profiler (MAMP) to provide environmental data along the entire spatial range relevant to the farm. However, while MAMPs have much higher spatial range and resolution than fixed sensor arrays, an aquaculture site is dynamic. To capture the shifts in the site’s state, the profiler must take quick, sparse measurements and determine the overall environment from those samples. This paper’s goal is to propose an implementation of a probabilistic algorithm that enables reconstruction and prediction of the farm’s state from sparse samples for use in path planning using Gaussian Regression Processes. The proposed approach is verified against experimental ocean environment data, and shows >95% accuracy in environment reconstruction while requiring only 10% of the number of data samples as the ground truth data set. It is further implemented in conjunction with a Markov Decision Process based planner to demonstrate the algorithm’s use in path planning. This work indicates the high potential of the algorithm for use on dynamic environments like aquaculture farm sites.
 Jenny Walker, University of Southampton, UK
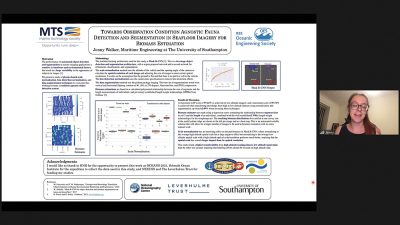
Jenny Walker, University of Southampton, UK
Towards observation condition agnostic fauna detection and segmentation in seafloor imagery for biomass estimationAbstract—The performance of automated object detection and segmentation in marine imaging applications is sensitive to hardware and environmental factors that result in a large variability in the appearance of subjects in images. This paper investigates physics based scale normalisation, lens distortion normalisation, and data augmentation techniques to overcome this, working towards a condition agnostic object detection system. A total of over 700 rockfish in images taken from different altitudes using different camera equipped Autonomous Underwater Vehicles at the Southern Hydrates Ridge (depth 780 m) are used to train and test object detection and segmentation using Mask R-CNN. Images taken from low altitudes of ∼2 m achieve a maximum mean average precision (mAP) score of 97.42%, and images taken from high altitudes of ∼6 m achieve a maximum score of 87.4% when object detection and segmentation is trained and tested on images taken from the same altitudes. When transferring knowledge across different imaging conditions, a mAP score of 87.7% is achieved when transferring knowledge from high to low altitude datasets, and 49.6% when transferring from low to high altitudes. In both cases, significant gains in performance is seen when the images used are scale normalised. The results indicate that increasing the pixel resolution, or the size an object appears within the image, benefits learning regardless of the optical resolution images are taken at, and this should be carefully considered in future object detection and segmentation studies. We also describe a novel method to estimate biomass distribution from the segments output by modern machine learning algorithms that can be easily adapted for different morphospecies.
 Jonathan Wallen, University of Hawaii at Manoa, USA
Jonathan Wallen, University of Hawaii at Manoa, USA
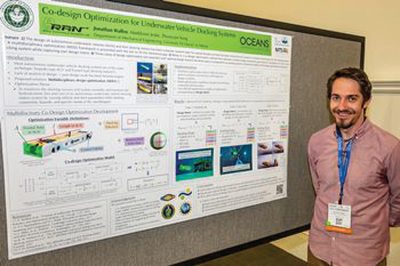
Co-design optimization for underwater vehicle docking systems
Abstract—The design of autonomous underwater vehicles (AUVs) and their docking stations has been a popular research topic for several decades. Although many AUV and dock designs have been proposed, materialized, and commercialized, most of these existing designs prioritize the functionality of the AUV over the dock, or vise versa; there has been limited formal research in analytical optimization for AUV docking systems. In this paper, a multidisciplinary optimization framework is presented with the aim to fill this theoretical gap. We propose a co-design optimization method that optimizes multiple design parameters governing the archetype of an AUV and its docking system. Capturing the user design intents in the optimization process, the proposed method produces a set of optimal design parameters that satisfies a set of predefined bounds, constraints, and initial conditions. Three cases of design optimization are reported for different design intents. Each optimal design found in the three cases is compared to an existing system to show the validity of this design optimization framework.
 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.