Shyam Madhusudhana, OES Student Poster Competition Chair
The Student Poster Competition (SPC) is a flagship event of the MTS/OES OCEANS conferences in which undergraduate and graduate students from colleges and universities around the world participate. The SPC was envisioned and created by Col. Norman Miller and was first implemented in 1989. It has been a feature of OCEANS conferences ever since. Typically, 15-20 students are selected to participate in the Competition, based on reviews (two stages) of their abstracts. The selected students get an opportunity to present, at the OCEANS conference, a poster describing their work.
Given the pandemic-induced lockdowns and travel restrictions around the globe, this year’s Singapore and Gulf Coast OCEANS conferences were merged into a unified virtual event, Global OCEANS 2020, in ensuring continuity in the OCEANS conferences series. The SPCs of the constituent editions of the conference, however, were held independently, with 11 and 13 student participants in the Singapore and Gulf Coast editions, respectively. For this SPC, the participating students were required to switch to electronic posters. Poster formats were prescribed beforehand to ensure that the submitted posters were conducive for online presentations. The students were also required to submit a pre-recorded 5-minute video of their presentations providing a quick overview of their study orally. Interactions between participants and judges were facilitated via managed one-on-one Q&A sessions during the conference.
I would like to congratulate the Local Organizing Committee (LOC) General Chairs and the LOC SPC Chairs for beating all pandemic-related predicaments and “pulling off” a successful SPC event. The SPC leadership included LOC SPC Chairs Too Yuen Min (from Singapore OCEANS) and Stephan Howden (from Gulf Coast OCEANS). I also take this opportunity to thank the sponsors—Office of Naval Research, Office of Naval Research-Global, Schmidt Ocean Institute and National Oceanic and Atmospheric Administration—for their support of this year’s SPC and also for their continued support for OCEANS conferences in general.
The full list of participants (including the prize winners) together with their affiliation, poster title and an abstract of their poster are given below.
Singapore SPC
 First Prize, Norman Miller Award (Certificate & $3000 prize)
First Prize, Norman Miller Award (Certificate & $3000 prize)
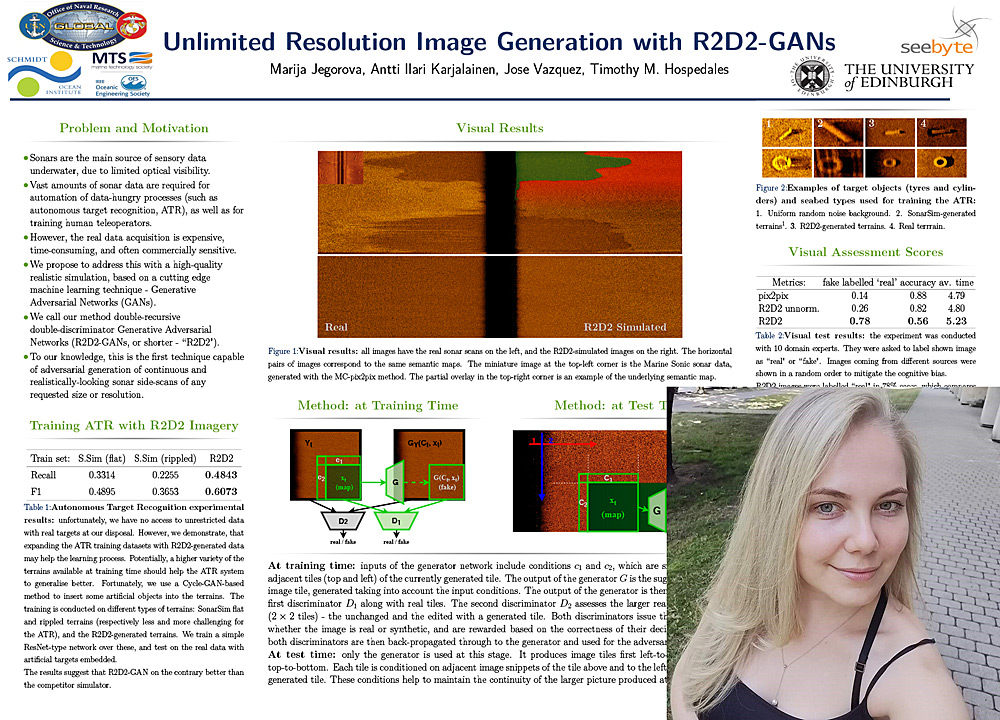
Marija Jegorova, The University of Edinburgh, UK
Unlimited Resolution Image Generation with R2D2-GANs
Abstract—In this paper we present a novel simulation technique for generating high quality images of any predefined resolution. This method can be used to synthesize sonar scans of size equivalent to those collected during a full-length mission, with across track resolutions of any chosen magnitude. In essence, our model extends Generative Adversarial Networks (GANs) based architecture into a conditional recursive setting, that facilitates the continuity of the generated images. The data produced is continuous, realistically-looking, and can also be generated at least two times faster than the real speed of acquisition for the sonars with higher resolutions, such as EdgeTech. The seabed topography can be fully controlled by the user. The visual assessment tests demonstrate that humans cannot distinguish the simulated images from real. Moreover, experimental results suggest that in the absence of real data the autonomous recognition systems can benefit greatly from training with the synthetic data, produced by the R2D2-GANs.
 Second Prize (Certificate and $2000 prize)
Second Prize (Certificate and $2000 prize)
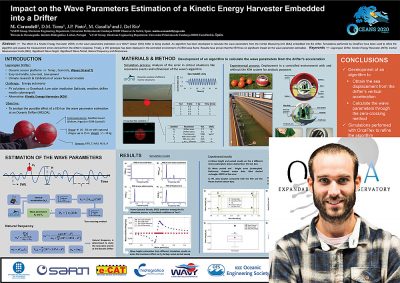
Matias Carandell, Universitat Politecnica de Catalunya, Spain
Impact on the Wave Parameters Estimation of a Kinetic Energy Harvester Embedded into a Drifter
Abstract—The effect of a Kinetic Energy Harvester (KEH) on the wave parameters estimation at a WAVY Ocean (WO) drifter is being studied. An algorithm has been developed to calculate the wave parameters from the Inertial Measuring Unit (IMU) embedded on the drifter. Simulations performed by OrcaFlex have been used to refine the algorithm and assess the measurement errors derived from the drifter response. Finally, a WO prototype has been deployed in the controlled environment of CIEM wave flume. Results prove that the KEH has no significant impact on the wave parameter estimation.
 Third Prize (Certificate and $1000 prize)
Third Prize (Certificate and $1000 prize)
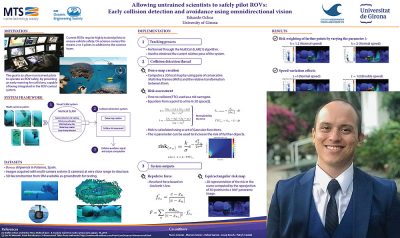
Eduardo Ochoa Melendez, University of Girona, Spain
Allowing untrained scientists to safely pilot ROVs : Early collision detection and avoidance using omnidirectional vision
Abstract—The study of underwater environments involves multiple hazards that can compromise the safety of robots. Underwater missions require a high level of attention from Remotely Operated Vehicle (ROV) operators to avoid damage to the robot. For this reason, there is a growing trend in research to develop systems with new capabilities, such as advanced assisted mapping, spatial awareness and safety, and user immersion.
The aim of this work is to devise a system that provides the vehicle with proximity awareness capabilities for navigation in complex environments. By using the advantages of omnidirectional multi-camera systems, a much higher level of spatial awareness can be achieved. This paper presents a visual-based multi-camera system which is able to detect the presence of nearby objects in the environment, to create a local map of points, and to assign collision risk values to this map. The system exploits this information to generate warnings when approaching potentially dangerous obstacles and at the same time creates a collision risk map that provides a proximity awareness representation of the environment.
 Matteo Bresciani, Università di Pisa, Italy
Matteo Bresciani, Università di Pisa, Italy
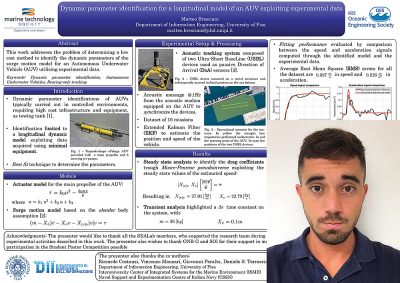
Dynamic parameters identification for a longitudinal model of an AUV exploiting experimental data
Abstract—This work addresses the problem of determining a low cost method to identify the dynamic parameters of the surge motion model for an Autonomous Underwater Vehicle (AUV) utilising experimental data. With this goal, various sea tests were planned and carried out, involving minimal equipment. In particular, an acoustic tracking system composed of passive Direction of Arrival (DoA) sensors was used to track the vehicle while moving underwater. Such dataset was exploited to identify the values of the dynamic parameters with a best fit approach. Eventually, the comparison between the signals computed through the identified model and the experimental data has been reported as a preliminary evaluation.
 Hui-Min Chou, National Sun Yat-sen University, Taiwan
Hui-Min Chou, National Sun Yat-sen University, Taiwan
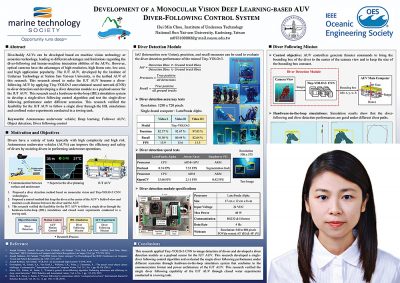
Development of a Monocular Vision Deep Learning-based AUV Diver-Following Control System
Abstract—Divers have a variety of tasks typically with high complexity and high risk. Autonomous underwater vehicles (AUVs) can improve the efficiency and safety of divers by assisting divers in performing underwater operations. A dive-buddy AUV should have the ability to follow a diver and interact with a diver. Dive-buddy AUVs can be developed based on machine vision technology or acoustics technology, leading to different advantages and limitations regarding the diver-following and human-machine interaction abilities of the AUVs. Compared with sonar devices, the main limitation of optical cameras is their short underwater visibility range. However, optical cameras have the advantages of high resolution, high frame rate, low cost, and high application popularity. The IUT AUV, developed by the Institute of Undersea Technology at Nation Sun Yat-sen University, is the testbed AUV of this research. This research aimed to make the IUT AUV become a diver-following AUV. This research applied Tiny-YOLOv3 convolutional neural network (CNN) to image detection of divers and developed a diver detection module as a payload sensor for the IUT AUV. This research developed a single-diver following control algorithm and evaluated the single-diver following performance under different scenarios through hardware-in-the-loop simulation (HIL) system that conforms to the communication format and power architecture of the IUT AUV. This research verified the single-diver following capability of the IUT AUV through closed water experiments conducted in a towing tank.
 Basil Hable, University of Wisconsin-Milwaukee, USA
Basil Hable, University of Wisconsin-Milwaukee, USA
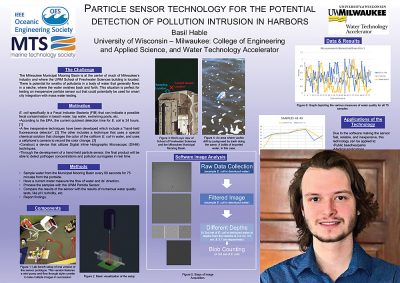
A novel particle sensor for the detection of pollution intrusion in harbors
Abstract—The University of Wisconsin – Milwaukee’s School of Freshwater Sciences is built at a port serving building materials companies, a grain elevator complex, a salt warehouse, a nearby oil company, an industrial refuse dumping ground, and has the city of Milwaukee, Wisconsin, USA’s sewage treatment plant across the river. Naturally, this area is a testbed for finding environmentally-sound business solutions for public and private entities at the confluence of the Kinnickinnic River and Milwaukee Municipal Mooring Basin. Our group has developed an optical sensor for detecting particulate matter suspended in water at a lower cost and faster speeds than traditional methods. This manuscript will discuss the implementation and effectiveness of the sensor for detecting changes in the port’s water quality.
 Mingi Jeong, Dartmouth College, USA
Mingi Jeong, Dartmouth College, USA
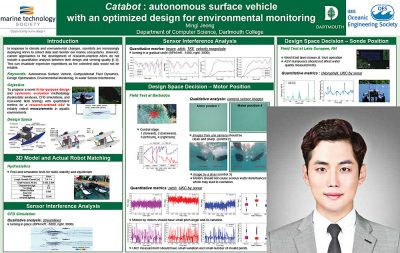
Catabot: Autonomous Surface Vehicle with an Optimized Design for Environmental Monitoring
Abstract—This paper presents an optimized design of research-oriented ASVs and a systematic design evaluation methodology for reliable in-water sensing. The objective is to minimize the interference on sensor readings by any ASV maneuver. The design space includes motors and sensors locations. In addition, this paper analyzes modularity – i.e., the effects of new sensor’s installation. All prototype designs are thoroughly tested using hydrostatic analyses, Computational Fluid Dynamics (CFD) simulations, and real-world field testings. Quantitative metrics, including trim, pitch, velocity magnitude of flow, and turbulence, are used to compare different configurations. Our experiments show that a motor configuration at the back part of the straights hulls is the most optimal design, resulting in high-quality data collection.
 Nare Karapetyan, University of South Carolina, USA
Nare Karapetyan, University of South Carolina, USA
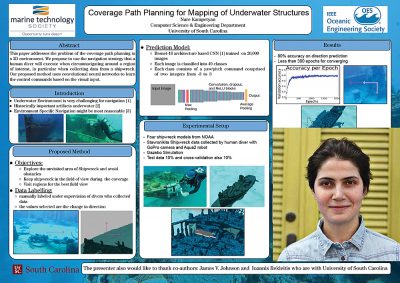
Coverage Path Planning for Mapping of Underwater Structures
Abstract—This paper addresses the problem of the coverage path planning in a 3D environment for surveying underwater structures. We propose to use the navigation strategy that a human diver will execute when circumnavigating around a region of interest, in particular when collecting data from a shipwreck. In contrast to the previous methods in the literature, we are aiming to perform coverage in completely unknown environment with some initial prior information. Our proposed method uses convolutional neural networks to learn the control commands based on the visual input. Preliminary results and a detailed overview of the proposed method are discussed.
 Byeongjin Kim, Pohang University of Science and Technology, Republic of Korea
Byeongjin Kim, Pohang University of Science and Technology, Republic of Korea
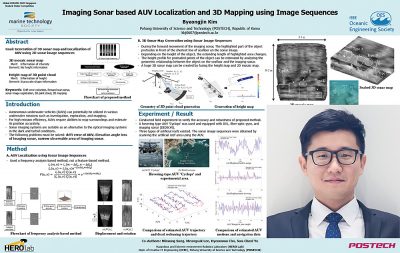
Imaging Sonar based AUV Localization and 3D Mapping using Image Sequences
Abstract—This paper proposes a three-dimensional (3D) sonar mapping method and autonomous underwater vehicle (AUV) localization method using two-dimensional (2D) sonar image sequences of an imaging sonar. The 2D sonar image sequences are registered to generate a 2D mosaic sonar map. In this process, we can estimate the displacement and rotation relationship between the sonar image pairs, and use this to estimate the position of the AUV. A 3D point cloud is generated from 2D sonar image sequences. This method takes advantage of the mobility of the AUV to reconstruct the height information, and partially solves the ambiguity issues in the elevation angle of the imaging sonar. The height map is generated by accumulating the 3D point cloud. By fusing two maps, we can generate a 3D sonar map. We verified the proposed method by conducting field experiments. Three types of artificial reef on the seabed were scanned, and a 3D sonar map was created. In the process, the trajectory of the AUV was estimated and compared with the trajectory of the dead reckoning.
 Kexin Li, National University of Singapore, Singapore
Kexin Li, National University of Singapore, Singapore
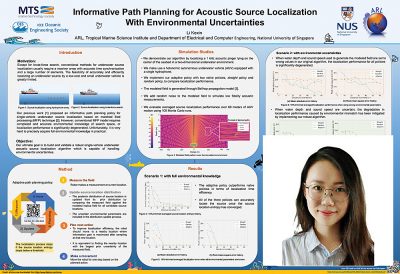
Informative Path Planning for Acoustic Source Localization With Environmental Uncertainties
Abstract—Source localization in the context of underwater environment has been recognized as an important but challenging research topic. Conventional methods usually require a receiver array with accurate time synchronization and a large number of elements. The feasibility of accurately localizing an underwater source by a low-cost and small underwater vehicle is greatly limited. Our previous work has successfully applied matched field processing concept to do single-vehicle underwater source localization with informative path planning. However, it requires accurate environmental knowledge of entire search space. In this paper, we focus on improving the robustness of our originally proposed approach. This improvement aims to ensure that our proposed source localization approach performs well even with the presence of environmental uncertainties. Simulation studies show that our robust method is capable of mitigating the effect of environmental mismatch in the MFP model for source localization.
 XiaoGang Li, Ocean University of China, China
XiaoGang Li, Ocean University of China, China
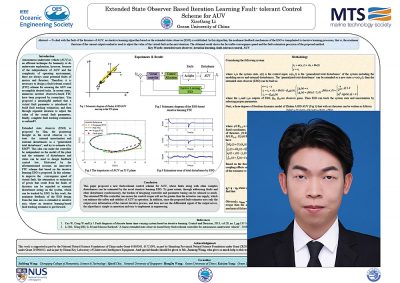
Extended State Observer Based Iteration Learning Fault-tolerant Control Scheme for AUV
Abstract—To deal with the fault of the thrusters of AUV, an iterative learning algorithm based on the extended states observer (ESO) is established. In this algorithm, the nonlinear feedback mechanism of the ESO is transplanted to iterative learning processes, that is, the nonlinear function of the current output residual is used to adjust the value of the virtual fault in the next iteration. The obtained result shows the favorable convergence speed and the fault estimation precision of the proposed method.
Gulf Coast OCEANS
 First Prize, Norman Miller Award (Certificate & $3000 prize)
First Prize, Norman Miller Award (Certificate & $3000 prize)
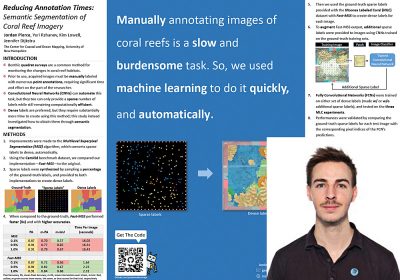
Jordan Pierce, University of New Hampshire, USA
Reducing Annotation Times: Semantic Segmentation of Coral Reef Survey Images
Abstract—Benthic quadrat studies requiring time-intensive manual image annotation are currently a critical component of assessing the health of coral reefs. Patch-based image classification using convolutional neural networks (CNNs) can automate this task by providing sparse labels, but remain computationally inefficient. This work extends the idea of automatic image annotation by using fully convolutional networks (FCNs) to provide dense labels through semantic segmentation. We present an improved version the Multilevel Superpixel Segmentation (MSS) algorithm, which repurposes existing sparse labels for images by converting them into the dense labels necessary for training a FCN automatically. Our implementation—Fast-MSS—is demonstrated to perform considerably faster than the original without sacrificing accuracy. To showcase the applicability to benthic ecologists, we validate this method using the Moorea Labeled Coral (MLC) dataset as a benchmark. FCNs are evaluated by comparing their predictions on test images with the corresponding ground-truth sparse labels. Our results indicate that FCNs’ perform with accuracies that are suitable for many ecological applications, and can increase even further when trained on dense labels augmented with additional sparse labels provided by a patch-based image classifier. The contributions of this study help move the field of benthic ecology towards more efficient monitoring of coral reefs through entirely automated processes.
 Second Prize (Certificate and $2000 prize)
Second Prize (Certificate and $2000 prize)
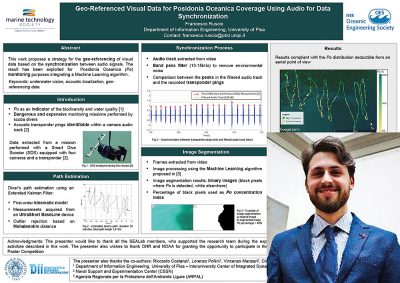
Francesco Ruscio, University of Pisa, Italy
Geo-referenced visual data for Posidonia Oceanica coverage using audio for data synchronization
Abstract—The supervision of underwater areas is essential for the preservation of marine ecosystems. In the Italian context, Professional divers of Environmental Protection Agencies are periodically involved in monitoring activities that are repetitive, dangerous, and expensive. The Ligurian Regional Agency for the Environmental Protection (ARPAL) and the University of Pisa (UNIPI) are collaborating towards the employment of robots and ICT tools to improve the monitoring activities in terms of safety, cost and time effectiveness. This paper reports a strategy to geo-reference underwater visual data using audio for data synchronization. The work refers to a visual dataset acquired by a Smart Dive Scooter (SDS) during a Posidonia Oceanica (Po) monitoring activity in front of the Ligurian Coast. The proposed strategy concerns the synchronization between the audio track recorded by a camera and the transponder pings adopted for the SDS acoustic positioning system. The paper also reports the exploitation of the geo-referenced optical data for the identification of Po meadow over the mission area using a Machine Learning algorithm. The results are very promising and can lead to an accurate geo-referenced identification of Po and the reconstruction of the surveyed area.
 Third Prize (Certificate and $1000 prize)
Third Prize (Certificate and $1000 prize)
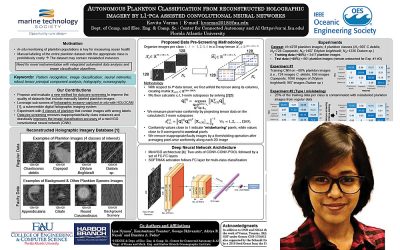
Kavita Varma, Florida Atlantic University, USA
Autonomous Plankton Classification from Reconstructed Holographic Imagery by L1-PCA-assisted Convolutional Neural Networks
Abstract—Monitoring and characterization of plankton species abundance and distribution in both freshwater and marine environments around the world is key for forecasting harmful algal bloom events that can cause substantial damage to aquatic ecosystems as well as the local economy. In this paper, we leverage reconstructed imagery from a novel submersible holographic system to test experimentally a new data analysis tool for robust training of a convolutional neural network (CNN) toward rapid high-confidence classification of plankton. Manual labeling oft he entire plankton dataset with the appropriate class is often prohibitively costly, therefore the dataset may contain mislabeled instances. We test a new method based on L1-norm principal-component analysis to improve the quality of labeled data sets. We carry out experiments with four classes of plankton that may contain images with wrong labels. First, the training data in each class is contaminated with images that belong to one of the four classes. Then, we consider images from other plankton species and images of background scenery that contaminate the training data of the four classes. We show that L1-norm tensor-conformity curation of the data identifies and removes inappropriate class instances from the training set and drastically improves the classification accuracy of a miniVGG CNN in both cases.
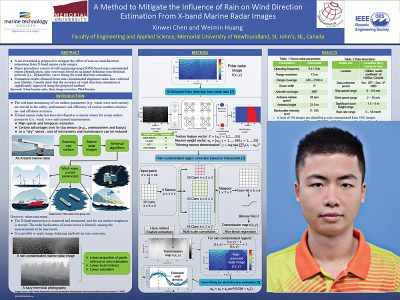 Xinwei Chen, Memorial University of Newfoundland, Canada
Xinwei Chen, Memorial University of Newfoundland, Canada
A Method to Mitigate the Influence of Rain on Wind Direction Estimation From X-band Marine Radar Images
Abstract—In this paper, a novel scheme is employed to mitigate the influence of rain on wind direction estimation from X-band marine radar data. Rain-contaminated regions with blurry wave signatures are first identified using the self-organizing-map(SOM)-based clustering model. Pixels located in those regions are then corrected using a deep-neural-network-based image dehazing model called DehazeNet. After obtaining the rain-corrected radar image, wind direction can be obtained using the classic curve-fitting-based method. Shipborne marine radar data collected under precipitation in a sea trial off the east coast of Canada are utilized to validate the proposed scheme. Experimental results show that the accuracy of wind direction estimation is significantly improved using the proposed scheme with a reduction of root mean square deviation (RMSD) by 19.1◦.
 Mohammad Imran Chowdhury, Florida State University, USA
Mohammad Imran Chowdhury, Florida State University, USA
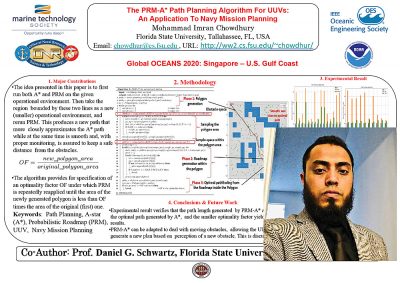
The PRM-A* Path Planning Algorithm For UUVs: An Application To Navy Mission Planning
Abstract—This paper presents a novel path planning algorithm for unmanned underwater vehicles (UUVs) that arises by combining two well-known algorithms in such a way as to exploit their respective advantages while mitigating their deficiencies. The two algorithms are A-star (A*) and Probabilistic Road Map (PRM). The operational environment is given as a portion of open sea interspersed with various obstacles. The free space is the portion not occupied by obstacles.
A* employs heuristic search to explore the free space for a path from the start to the goal. This algorithm always returns the shortest (optimal cost) path. A drawback is that the path sometimes runs dangerously close to an obstacle. In addition, the computed path can have sharp turns that are difficult for the UUV to negotiate.
PRM starts with a random sampling of the points in the free space. Once some predetermined number of such points are chosen, each point is paired with some of it’s free space neighbors, and these pairs are recorded in what is called a road map. Then Dijkstra’s algorithm is applied to the road map using nearest neighbor information to find a path from the start node to the goal. This has the advantage that the resulting path is smooth (no sharp turns) and stays safely away from the obstacles. It has the drawback that the path is not optimal; it can be much longer than necessary.
The idea presented in this paper is to first run both A* and PRM on the given operational environment. Then take the region bounded by these two lines as a new (smaller) operational environment, and rerun PRM. This produces a new path that more closely approximates the A* path while at the same time is smooth and, with proper monitoring, is assured to keep a safe distance from the obstacles. This procedure can be repeated as many times as desired, each time producing a better approximation of the optimal A* path.
While the focus here has been on UUVs, the same approach can be applied for unmanned surface vehicles (USVs).
 Johnson Oguntuase, University of Southern Mississippi, USA
Johnson Oguntuase, University of Southern Mississippi, USA
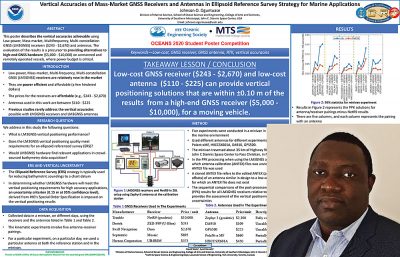
Vertical Accuracies of Mass-Market GNSS Receivers and Antennas in Ellipsoid Reference Survey Strategy for Marine Applications
Abstract—This paper describes the vertical accuracies achievable using Low-power, Mass-market, Multifrequency, Multi-constellation GNSS (LM3GNSS) receivers, and antennas, and evaluates the results as a precursor to providing alternatives to high-end GNSS hardware on emerging remotely operated and unmanned systems, such as autonomous surface vehicles (ASV), small unmanned aircraft systems (sUAS), and offshore GNSS buoys. The LM3GNSS receivers are relatively new in the market, and they are affordable ($243 – $2,670). Given their low-power characteristics, they readily fulfill the power budget requirement aboard marine systems. In the first round of our studies, we conducted five experiments in a minivan, which traveled at approximately 80 km per hour (50 mph) with matching pairs of receivers and antennas. We assume that the results should be comparable to solutions aboard a marine vessel at typical hydrographic survey speeds (10 – 20 km per hour {5 – 10 knots}). The matching pairs of receivers include four LM3GNSS hardware, Trimble NetR9 receiver, and Zephyr3 antenna. The results show that LM3GNSS receivers are capable of achieving vertical positioning uncertainties that are within 10 cm of the geodetic results (95% confidence level).
 Özer Özkahraman, KTH Royal Institude of Technology, Sweden
Özer Özkahraman, KTH Royal Institude of Technology, Sweden
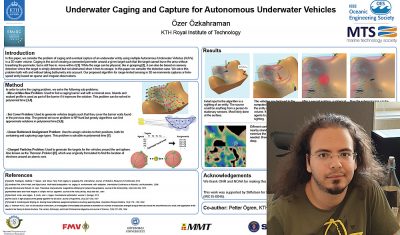
Underwater Caging and Capture for Autonomous Underwater Vehicles
Abstract—In this paper, we consider the problem of caging and eventual capture of an underwater entity using multiple Autonomous Underwater Vehicles (AUVs) in a 3D water volume We solve this problem both with and without taking bathymetry into account. Our proposed algorithm for range-limited sensing in 3D environments captures a finite-speed entity based on sparse and irregular observations. After an isolated initial sighting of the entity, the uncertainty of its whereabouts grows while deployment of the AUV system is underway. To contain the entity, an initial cage, or barrier of sensing footprints, is created around the initial sighting, using islands and other terrain as part of the cage if available. After the initial cage is established, the system waits for a second sighting, and the possible opportunity to create a smaller, shrinkable cage. This process continues until at some point it is possible to create this smaller cage, resulting in capture, meaning the entity is sensed directly and continuously. We present a set of algorithms for addressing the scenario above, and illustrate their performance on a set of examples. The proposed algorithm is a combination of solutions to the min-cut problem, the set cover problem, the linear bottleneck assignment problem and the Thomson problem.
 Amy Phung, Olin College of Engineering, USA
Amy Phung, Olin College of Engineering, USA
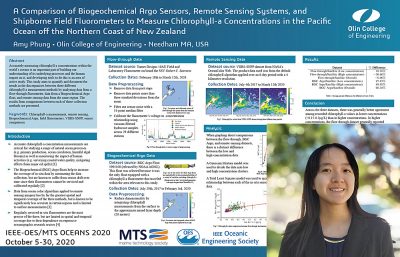
A comparison of Biogeochemical Argo sensors, remote sensing systems, and shipborne field fluorometers to measure Chlorophyll-A concentrations in the Pacific Ocean off the northern coast of New Zealand
Abstract—Accurately measuring chlorophyll a concentrations within the world’s oceans is an important part of building our understanding of its underlying processes and the human impact on it, and developing tools to do this is an area of active study. Some methods used today to collect this data include in-situ fluorometers on board automated Biogeochemical Argofloats, flow-through fluorometers on board ocean going vessels, and ocean color algorithms applied to remote sensing data. While shipborne field fluorometers are the most accurate of the three since they can be recalibrated before and after each expedition, they are limited in spatial and temporal coverage due to their dependence on expensive oceanographic research cruises. The Biogeochemical floats help to increase the coverage of fluorometer data by automating the data collection, but are known to suffer from sensor drift over time since their fluorometers cannot be serviced and calibrated regularly. Remote sensing data has by far the greatest spatial and temporal coverage of the three methods, but is known to be significantly less accurate in certain regions and is limited to surface measurements. This study compares these three measurement methods by analyzing data collected by a 10AU Field and Laboratory Fluorometer connected to a flow-through system, data from a Biogeochemical Argo float, and satellite data from the VIIRS-SNPP dataset in the same region. The results of comparisons between each of these collection methods are presented.
 Maria Pereira, University of Porto, Portugal
Maria Pereira, University of Porto, Portugal
Detecting Docking-based Structures for Persistent ASVs using a Volumetric Neural Network
Abstract—In recent years, research concerning the operation of Autonomous Surface Vehicles (ASVs) has seen an upward trend, although the full-scale application of this type of vehicles still encounters diverse limitations. In particular, the docking and undocking processes of an ASV are tasks that currently require human intervention. Aiming to take one step further towards enabling a vessel to dock autonomously, this article presents a Deep Learning approach to detect a docking structure in the environment surrounding the vessel. The work also included the acquisition of a dataset composed of LiDAR scans and RGB images, along with IMU and GPS information, obtained in simulation. The developed network achieved an accuracy of 95.99%, being robust to several degrees of Gaussian noise, with an average accuracy of 93.34% and a deviation of 5.46% for the worst case.
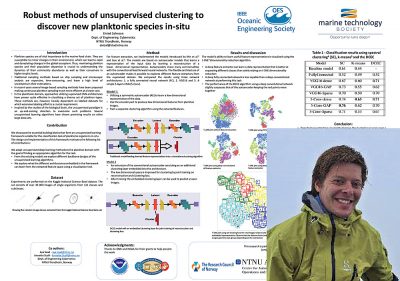 Eivind Salvesen, NTNU, Norway
Eivind Salvesen, NTNU, Norway
Robust methods of unsupervised clustering to discover new planktonic species in-situ
Abstract—Plankton species are of vital importance to the marine food chain. They are susceptible to minor changes in their environment, which can lead to rapid and devastating changes in the global ecosystem. Thus, monitoring plankton species and their population dispersion is crucial to understanding the dynamics of their community abundance as well as their consumers in higher trophic levels. Technological advancements of systems providing high-resolution imaging augmented by powerful computing devices made it possible to infer the distribution from sampling millions of planktonic images at low cost. Yet, this requires an extensive and time consuming manual labeling effort. The process of training to distinguish different species on manually labeled data is called supervised learning. The objective of this paper is to find new algorithms capable of minimizing the training supervision and assisting in discovering unseen classes. We explore the use of unsupervised classes of models for in-situ classification and identification of planktonic images. The aim is to embed those models into existing robotic imaging platforms to enhance the classification ability and to allow the discovery of new classes without any prior knowledge or exhaustive labeling effort. This work compares different models and shows their abilities to learn essential data structures over the National Science Bowl planktonic dataset.
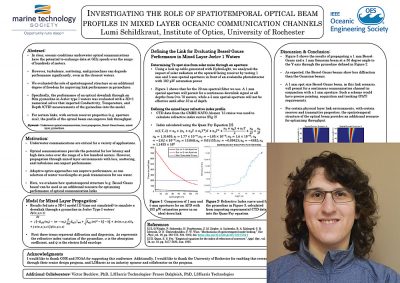 Lumi Schildkraut, University of Rochester, USA
Lumi Schildkraut, University of Rochester, USA
Investigating the Role of Spatiotemporal Optical Beam Profiles in Mixed Layer Oceanic Communication Channels
Abstract—Underwater optical communication channels can provide access to GHz speed communications between assets located within a few hundred meters range of each other. However, channel phenomena such as turbulence, scattering layers, and propagation through density gradients (pycnoclines) even in the clearest of natural waters, can significantly degrade channel performance. Here, the role of the spatiotemporal structure of the optical resource is considered as a mechanism for improving performance of a surface-to-subsea downlink scenario through a typical pycnocline in clear, oceanic waters. A 3D+1 numerical solver was developed to incorporate experimentally collected CTD measurements of a pycnocline in the upper 80 m of the mixed layer in order to evaluate and compare the propagation of semi non-diffracting Bessel-Gauss beams and standard Gaussian beams through Jerlov Case 1 waters. In certain link environments with certain initial beam parameters, we find that utilizing nonstandard optical resources can provide system performance advantages.
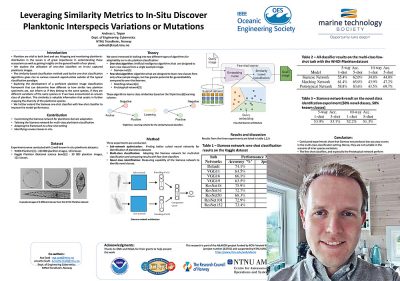 Andreas Teigen, NTNU, Norway
Andreas Teigen, NTNU, Norway
Leveraging Similarity Metrics to In-Situ Discover Planktonic Interspecies Variations or Mutations
Abstract—Planktons are vital to our planet’s ecosystems. Mapping and monitoring planktonic-distribution in the ocean is of great importance in understanding these ecosystems as well as gaining insights on the general health of our planet. The task of identifying different planktonic species and their concentrations is a critical yet challenging part of this endeavor. In this paper, we explore the utilization of one-shot classifiers on in-situ captured planktonic images. The similarity-based classification method used by the one-shot classification algorithms gives rise to various research opportunities outside of the typical classification paradigm. Exploring the development of a proficient plankton image classification framework that can determine how different or how similar two plankton specimens are, can inform us if they belong to the same species, if they are different variations of the same species or if we have encountered a completely unseen classes of plankton. This similarity is valuable information that assists in further mapping the diversity of the planktonic species. We further extend the Siamese one-shot classifier with few-shot classifier to improve the model performance. Empirical evaluations of the new extension yield promising results.
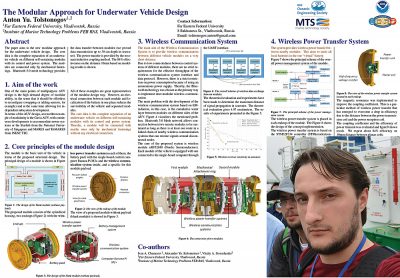 Anton Tolstonogov, Far Eastern Federal University, Russia
Anton Tolstonogov, Far Eastern Federal University, Russia
The Modular Approach for Underwater Vehicle Design
Abstract—The authors propose a new modular design of an underwater vehicle in the article. The core idea is the complete separation of an underwater vehicle on different self-sustaining modules with its control and power system. It is proposed that wireless technology will provide data and power transfer between modules. The approach might be useful for design low-cost underwater vehicles for surveying in shallow water (up to 100 meter depth) with different replaceable payload modules. The paper presents the principal design of modules and their joint.
The communication system’s design based on Bluetooth Mesh is presented. The experiment shows reliable data transmission upto 35mm in seawater and up to 100mm in seawater with plastic supports between module housings.
The power management system is presented and discussed in the paper. The paper presents its overall design and the wireless power transfer system as the most critical node. The last one aims to unite batteries of all vehicle modules in the one “virtual” battery. It is shown that power transfer efficiency is up to 84% on distance 10mm between planar coils due to implementing the magnetic resonance method.
 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.