Dr. Yuen Min Too, Singapore LOC Student Poster Competition Chair
Dr. Shyam Madhusudhana, IEEE—OES Student Poster Competition Chair
The OCEANS 2024 Singapore conference, held from April 14 to 18, 2024, featured a flagship event—the Student Poster Competition (SPC), which served as a platform for showcasing cutting-edge research by students in ocean engineering and marine technology. This year, the OCEANS Singapore SPC received 66 abstract submissions. Following a meticulous two-stage review process, 16 exceptional posters emerged as finalists for the competition. The selected candidates received comprehensive financial backing, encompassing coverage for their conference registration fees, as well as expenses for travel and accommodation, all thanks to the generous sponsorship of the Office of Naval Research Global (ONR-G). The Schmidt Ocean Institute has graciously continued its contribution of prize money for OCEANS Singapore SPC. We also extend our gratitude to our sponsoring societies, the Oceanic Engineering Society (OES) and the Marine Technology Society (MTS), for their unwavering support, without which the success of the SPC would not be possible.
At the conference, all finalists participated in the SPC, showcasing their work to a captivated audience during well-attended poster sessions. The students’ energy and enthusiasm were contagious, making the conference a truly enriching experience for all. We express our deepest appreciation to the esteemed panel of six judges who generously volunteered their time. The judges provided valuable feedback by interacting directly with the participants and scoring their posters. The OCEANS Singapore SPC culminated with a prestigious awards ceremony held during the conference’s Gala dinner. Local Organizing Committee’s SPC Chair, Yuen Min Too, and IEEE OES SPC Chair, Shyam Madhusudhana, presented participation certificates and winning prizes.
Below is the list of participants, including prize winners, along with their affiliations, poster titles, and abstracts:


First prize (Norman Miller Award) (Certificate and $ 3000)
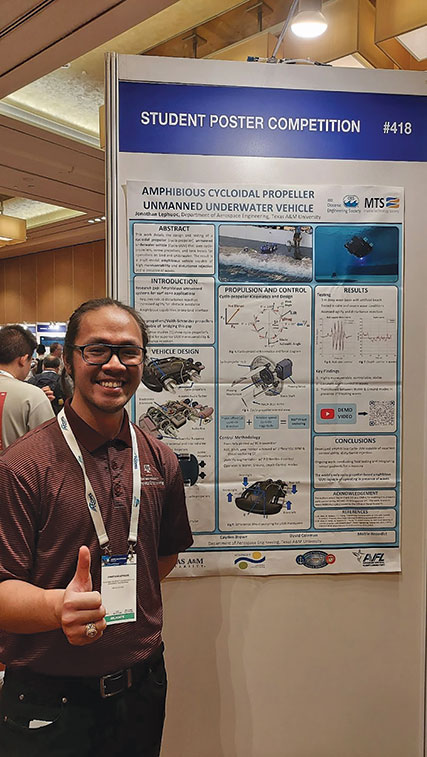
 Jonathan Lephuoc, Texas A&M University, USA
Jonathan Lephuoc, Texas A&M University, USA
Design and Testing of an Amphibious Cycloidal Propeller Unmanned Underwater Vehicle
Abstract—This paper covers the design, development, and testing of a 43 kg (95 lb) amphibious cycloidal propeller unmanned underwater vehicle (Cyclo-UUV) that utilizes a combination of cycloidal propellers (or cyclo-propellers), screw propellers, and tank treads for operations on land and underwater. The use of cyclo-propellers allows for 360◦ thrust vectoring for more robust dynamic controllability compared to UUVs with conventional screw propellers. Four cyclo-propellers are used to control the Cyclo-UUV while underwater and can be retracted into a set of four wheels to allow for transitioning between underwater and land locomotion. Control of the vehicle underwater is achieved by modulating the cyclo-propeller rotational speed and blade pitch phase angle, allowing for control over the magnitude and direction of the thrust vector of each cyclopropeller to enable surge, heave, roll, pitch, and yaw motions. These changes to pitch phase angle are controlled by rotary servos which receive commands via an on-board autopilot with an inertial measurement unit (IMU) that measures the vehicle’s attitude and stabilizes the vehicle using a proportional-integralderivative (PID) controller. Systematic testing of the Cyclo-UUV was conducted to verify its mechanical operation, trim the cyclopropellers for forward motion, tune the PID controller gain values for good response and disturbance rejection, and evaluate the vehicle’s performance in both calm water and in the presence of breaking waves similar to those found in the surf zone. The Cyclo-UUV has demonstrated a high degree of maneuverability and controllability in forward motion underwater, as well as the unique capability of performing transitions between land and underwater through breaking waves.
 Second prize (Certificate and $ 2000)
Second prize (Certificate and $ 2000)
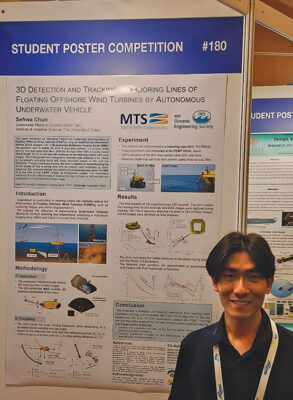
Sehwa Chun, The University of Tokyo, Japan
3D Detection and Tracking of Mooring Lines of Floating Offshore Wind Turbines by Autonomous Underwater Vehicle
Abstract—This paper introduces an innovative method for inspecting mooring lines of Floating Offshore Wind Turbines (FOWTs) using an Autonomous Underwater Vehicle (AUV) equipped with a tilt-controlled Multibeam Imaging Sonar (MBS). The approach aims to enable the AUV to accurately estimate the position of the mooring lines and safely track them. This method overcomes the limitations in traditional inspection techniques and lays the groundwork for the integration of additional methods for more detailed inspections.
With the tilt angle of the MBS and a pre-trained YOLO model, the AUV estimates 3D positions of the mooring chains with sonar imagery. The tracking method is designed to maintain safe distance to the chains by dynamically adjusting surge and sway velocities, based on the real-time detections. Through continuous tracking, the AUV is capable of reconstructing the whole structure of the mooring line with its position data estimated by dead-reckoning.
The proposed method was tested using a hovering type AUV, Tri-TON, in a sea trial at an FOWT, Hibiki, in Kitakyushu, Japan. The experiment validated the AUV’s effectiveness in tracking the mooring lines for 343 seconds and successfully reconstructing their entire structure. Moreover, the experimental results indicate a need for further tasks, particularly in enhancing the AUV’s positional accuracy and in conducting a thorough analysis of the chains’ physical characteristics to facilitate a more comprehensive evaluation of their condition.
 Third prize (Certificate and $ 1000)
Third prize (Certificate and $ 1000)
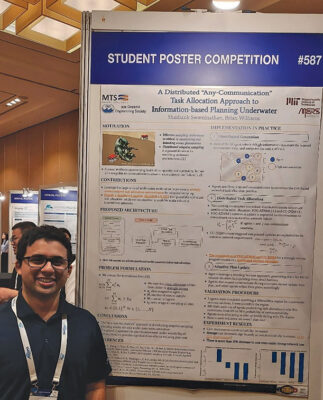
Shashank Swaminathan, Massachusetts Institute of Technology, USA
A Distributed “Any-Communication” Task Allocation Approach to Information-based Planning Underwater
Abstract—Autonomous ocean monitoring poses a unique challenge due to the dynamic and restrictive underwater environment. Distributed adaptive sampling can address many of the challenges of a large and evolving system; however, it typically requires strong assumptions on the communicability of the agents. This paper’s goal is to propose a novel “Any-Communication” approach to performing distributed adaptive sampling under limiting communication conditions, including the underwater space, through using a task allocation approach to information-based planning and a communication-robust distributed solver. The approach is verified against multiple randomized simulated trials, and the resultant improvement in optimality is compared against a naive distributed approach. The trials indicate that when under a simple linear cost agent model, the approach can provide up to 30% reduction in agent operational cost. More importantly, the improvement is proportional to the availability of communication. This works indicates the potential of the “Any-Communication” approach to distributed information-based planning under limited communication.
 Qianyi Zhang, Korea Advanced Institute of Science and Technology, South Korea
Qianyi Zhang, Korea Advanced Institute of Science and Technology, South Korea
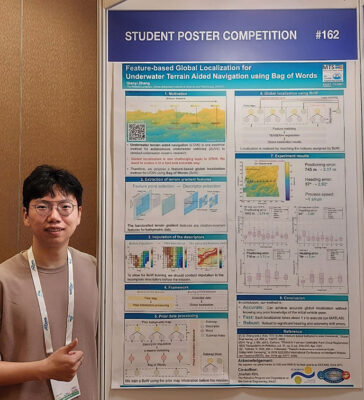
Feature-based Global Localization for Underwater Terrain Aided Navigation using Bag of Words
Abstract—This paper presents a novel feature-based global localization method for underwater terrain aided navigation (UTAN) using Bag of Words (BoW). Before the mission, the prior bathymetric map is segmented into submaps, and the handcrafted terrain gradient features are extracted from the submaps. Subsequently, a BoW is trained using these features, and the submaps are indexed accordingly. During the UTAN mission, place recognition is achieved by matching the index of the newly collected submap with the indexes of the submaps in the database, and the vehicle pose is determined using TEASER++ registration method. Experimental results using a sea trial dataset demonstrate that the proposed method can achieve a fast and robust global localization without requiring the prior initial vehicle pose information, offering robustness against substantial initial positioning and heading errors.
 Thomas Chové, Thales/IMT Atlantique, France
Thomas Chové, Thales/IMT Atlantique, France
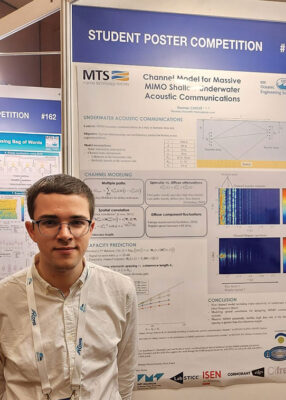
Channel Model for Massive MIMO Underwater Acoustic Communications
Abstract—Oceans are an environment attracting growing interest, with major economic stakes. There exists a need to design systems able to explore the underwater environment, one of the challenges being the ability to communicate undersea. The underwater acoustic channel is considered as being one of the most difficult environments for designing communication systems, due to multiple limitations (frequency band, latency, Doppler effect…).
A method that could allow an increase of the data rate is the use of massive MIMO (multiple inputs, multiple outputs) systems, where many transducers are used to emit as well as to receive the signal. The objective of this paper is to present a model for a massive MIMO underwater acoustic communication channel in order to carry out a preliminary analysis of the impact of array correlation on the theoretical achievable rate by using Shannon capacity.
 Xu Zhang, Shanghai Jiao Tong University, China
Xu Zhang, Shanghai Jiao Tong University, China
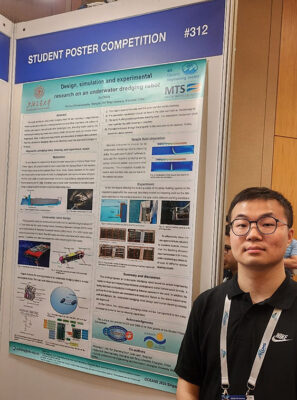
Design, Simulation, and Experiments of an Underwater Dredging Robot
Abstract—The paper studies underwater dredging robots for wall cleaning in long-distance water conveyance tunnels. Limnoperna fortunei and other organisms will adhere to water conveyance tunnel walls after a prolonged use, affecting the water’s quality. An underwater dredging robot was designed inside the tunnel walls to remove these organisms. The paper proposes a novel mechanical structure for underwater dredging. A detailed description of the machinery and control system of the working section is provided. Tests in actual pool experiments and simulations of nozzles demonstrated that the underwater dredging robot could effectively clean the adsorbed Limnoperna fortune.
 Yipeng Meng, Hangzhou Dianzi University, China
Yipeng Meng, Hangzhou Dianzi University, China
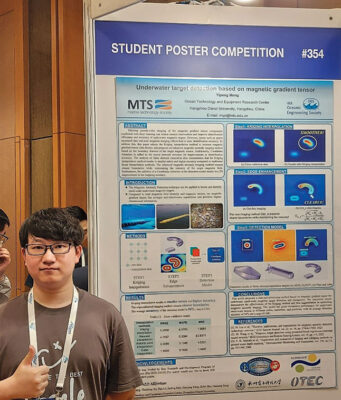
Underwater Target Detection Based on Magnetic Gradient Tensor
Abstract—The Magnetic Anomaly Detection technique can be applied to locate and identify small-scale magnetic targets underwater. Compared to total magnetic field intensity and magnetic vectors, the magnetic gradient tensor has stronger anti-interference capabilities and provides higher-dimensional information. Utilizing pseudo-color imaging of the magnetic gradient tensor components combined with deep learning can reduce manual intervention and improve identification efficiency and accuracy. However, issues such as sparse measured data and poor magnetic imaging effects lead to poor identification accuracy. To address this, this paper adopts the Kriging interpolation method to increase magnetic gradient tensor data density and proposes an enhanced magnetic anomaly imaging method based on the boundary features of the target magnetic source. Additionally, Coordinate Attention is added to the neural network structure for improvements in identification accuracy. The analysis of finite element simulation data for common underwater magnetic targets demonstrates that the Kriging interpolation method results in smaller errors and higher accuracy compared to traditional linear interpolation methods. The enhanced magnetic anomaly imaging method ensures significantly clearer boundaries while maintaining the intensity of the target magnetic field. Furthermore, the addition of a coordinate attention to the detection model resulted in a 2% improvement in the mapping accuracy. In summary, this work provides a novel solution for the detection of small-scale underwater magnetic targets with different positions, intensities, and shapes.
 Jingyu Qian, Zhejiang University, China
Jingyu Qian, Zhejiang University, China
Cross-medium communication combining infrared optical and acoustic waves
Abstract—In recent years, direct communication across the water-air interface without relay has become possible by combining acoustic and millimetre waves. Present cross-medium communication schemes combining acoustic and electromagnetic waves are carried out in three steps. First, the underwater transducer sends acoustic waves, and the waves hit the water surface and induce vibrations. Then, a millimeter-wave radar in the air sends electromagnetic waves to detect the water surface vibrations. Last, after processing the received signals from the radar, cross-medium communication is achieved. However, this scheme suffers from short communication distances (approximately 1 m over water) and low resolution (millimetre level). Laser Doppler Vibrometry (LDV) is superior with high resolution and long measuring distances. Therefore, for the first time, we creatively adopted infrared LDV instead of millimeter-wave radar. This new approach improves the communication distance and distance resolution and achieves cross-medium communication with 10.8 m above water and 3.5 m underwater. In this article, we reveal the transmission mechanism of cross-medium communication combining infrared and acoustic waves and use experiments to preliminarily verify the feasibility of this scheme. In our experiments, we evaluate the effects of the depth and carrier frequency of the transmitted acoustic wave signals as well as the height of the receiving end on cross-medium communication.
 Jeffrey Shao, University of New South Wales Sydney, Australia
Jeffrey Shao, University of New South Wales Sydney, Australia
Fractional Fourier Transform Based Channel Estimation in Underwater Acoustic Communications
Abstract—Underwater communications have severe channel distortions which can greatly affect its performance. This paper proposes a novel approach for estimating channel parameters (multipath delay and Doppler scaling) for underwater acoustic channels. The method is a Fractional Fourier Transform (FrFT) based approach with linear frequency-modulated (chirp) signals as a pilot. Innovation lies in the receiver design, where a 2D array is formed by performing a scan of FrFTs on the received signal. Key point detection algorithms are exploited to extract distinct X-shaped features in a 2D array, allowing for simultaneous estimation of both channel delay and Doppler parameters for all multipath components. The novel approach avoids the costly iterative process used in existing algorithms, which calculates Doppler scaling for one path per iteration. Simulation results show that the proposed algorithm is capable of estimating channel parameters in a severely time-delayed and Doppler-scaled multipath channel. The algorithm achieved a ±0.1% estimation accuracy with Doppler scaling factors ranging between 0.95 to 1.05. Multipath delay was estimated to within ±2ms for delays ranging from 0 to 0.2 seconds.
 Xiao Feng, Northwestern Polytechnical University, China
Xiao Feng, Northwestern Polytechnical University, China
Investigation of Three-Dimensional Sound Field Horizontal Refraction in Heterogeneous Topography
Abstract—The variability in seafloor topography is a primary factor influencing sound propagation. Complex and varied seabed topographies generate differing degrees of sound propagation effects, thereby altering the sound propagation loss compared to a flat seabed. This paper analyzes and statistically processes the slope data of the selected area’s terrain. It utilizes acoustic models to simulate and compare the sound propagation loss in convergence zones and near the deep-sea sound channel axis under different slope conditions. The findings indicate that an upslope terrain reduces propagation loss in convergence zones, and the propagation loss is minimized near the deep-sea sound channel axis when the downslope gradient is 7°. The paper also examines and discusses the impact of different bottom sediment parameters on sound propagation loss and the backscattering of acoustic energy in upslope conditions. Finally, the study analyzes the horizontal refraction effect in the three-dimensional sound field under complex terrain conditions from ray trajectories perspective.
 Chia-Cheng Hsu, National Taiwan University, Taiwan
Chia-Cheng Hsu, National Taiwan University, Taiwan
A Guidance Method for A Small Unmanned Surface Vehicle Wireless Charging
Abstract—A small unmanned surface vehicle (USV) usually carries a limited battery, and the mission duration is also limited. Wireless charging at sea is a way to extend the duration of USV. This work extends the study of developing a vector field-based guidance method for collision avoidance in the ship simulator. When the USV is in a vector field where near the charging station, the ship follows the vector field for guiding to touch the wireless charging plate. This vector field consists of a straight-line vector field and four circular vector fields in four quadrants to form a heading command to steer the ship. The feasibility of this work is tested by implementing the vector field guidance method into a ship simulator. In this work, the simulation considered wind, wave, and current influences on ship motions and combined the vector field-based guidance method to show the feasibility of the guidance method for USV wireless charging.
 John Fischer, Naval Postgraduate School, USA
John Fischer, Naval Postgraduate School, USA
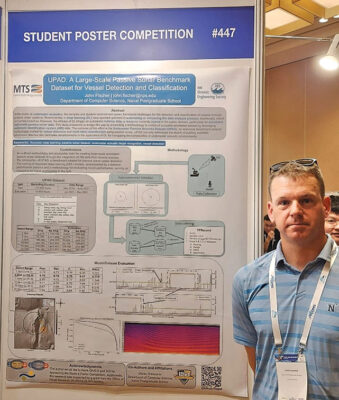
UPAD: A Large-Scale Passive Sonar Benchmark Dataset for Vessel Detection and Classification
Abstract—In the realm of underwater acoustics, the complex and dynamic environment poses formidable challenges for the detection and classification of vessels through passive sonar systems. Recent strides in deep learning (DL) have sparked optimism in automating or enhancing the data analysis process, traditionally reliant on human expertise. However, the efficacy of DL hinges on substantial training data, a resource currently scarce in the public domain, particularly for annotated real-world passive sonar data. This study endeavors to bridge this gap by presenting a methodology to construct a sizable annotated dataset by leveraging automatic identification system (AIS) data. The outcome of this effort is the Underwater Passive Acoustic Dataset (UPAD), an extensive benchmark dataset meticulously crafted for vessel detection and multi-label classification using passive sonar. UPAD not only addresses the dearth of publicly available benchmark data but also facilitates advancements in the application of DL for navigating the complexities of underwater acoustic environments.
 Jinzhi Cai, Hong Kong University of Science and Technology, Hong Kong
Jinzhi Cai, Hong Kong University of Science and Technology, Hong Kong
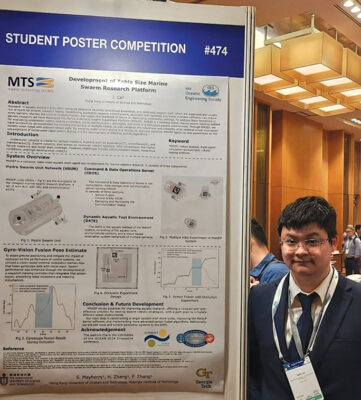
Development of Desktop-Size Marine Swarm Research Platform
Abstract—Research in aquatic environments often demands extensive facilities, specialized knowledge, and dedicated support staff, which are expensive and usually out of reach for smaller research teams. Establishing accessible research infrastructure,
especially with testbeds and freely available software, can reduce entry barriers, shorten the time to implementation, and lessen the likelihood of failure in challenging underwater settings. To address these limitations in aquatic research, we have developed the Marine Automatic Swarm Experiment Platform (MASEP). MASEP is a tabletop-sized, marine swarm robotics testbed for evaluating underwater robotic swarm controllers, novel communication strategies, and more in a simulated aquatic environment. Through MASEP, we have successfully demonstrated the tracking and control of multiple robots, as well validated the robustness and reliability of an external visual localization system when fused with onboard sensor data. By enabling multi-robot tracking in a miniature, low-cost platform, MASEP opens up new possibilities for the advancement of underwater robot swarm testing and the development of effective control algorithms.
 Jeremy Coffelt, University of Bremen/ROSEN Creation Center GmbH, Germany
Jeremy Coffelt, University of Bremen/ROSEN Creation Center GmbH, Germany
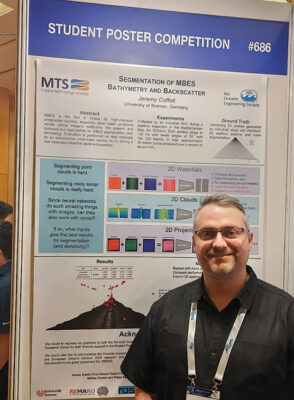
Segmentation of Multibeam Echosounder Bathymetery and Backscatter
Abstract—Multibeam echosounders (MBES) are the tool of choice for high-precision underwater surveys, especially when water conditions render optical imagery ineffective. We present and evaluate the following approaches for MBES segmentation: (1) real-time processing of single sounding profiles using traditional machine learning techniques, (2) batch processing of “waterfall” pseudo-images using a standard U-Net model, (3) the same model adapted to 2D projections of 3D point clouds, and (4) post-mission, survey-level processing using modern networks specifically designed for sparse point clouds. Strengths and weaknesses of the methods are discussed, including data preprocessing requirements, robustness, and ease of implementation/interpretation. Evaluation is performed on real data collected by an autonomous underwater vehicle (AUV) during a deep-sea industrial pipeline inspection.
 Fan Zhao, The University of Tokyo, Japan
Fan Zhao, The University of Tokyo, Japan
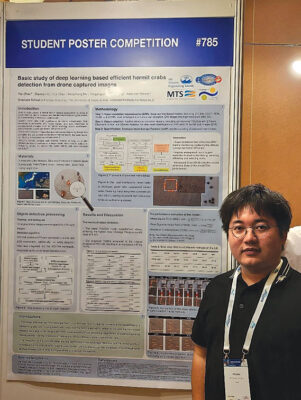
Basic study of deep learning based efficient hermit crabs detection from drone-captured images
Abstract—The challenges arising from water clarity, depth, and other factors intensify the difficulties in surveying underwater hermit crabs, exacerbated by a notable shortage of practical field surveys. This study introduces a novel approach utilizing consumer-grade Unmanned Aerial Vehicles (UAVs) and deep learning to investigate underwater hermit crabs. We applied diverse super-resolution algorithms, employing distinct design strategies for image enhancement. Furthermore, we utilized the proposed object detection model developed from YOLOv8, achieving a mean average precision (mAP) of 0.722, surpassing other state-of-the-art object detection algorithms. Applying UAVs and super-resolution technology has significantly progressed underwater hermit crab detection, providing practical solutions for aquatic ecological monitoring, and enabling precise benthos detection.
 Xin Qiao, Memorial University of Newfoundland, Canada
Xin Qiao, Memorial University of Newfoundland, Canada
Global Significant Wave Height Retrieval From Spaceborne GNSS-R Using Transformers
Abstract—Global significant wave height (SWH) is a crucial element in ocean observation and spaceborne global navigation satellite system reflectometry (GNSS-R) stands as a novel remote sensing technique to achieve large-scale measurement. Delay Doppler Map (DDM) is a basic observable of GNSS-R and existing studies have demonstrated the effectiveness of convolutional neural networks (CNNs) in SWH retrieval from DDMs. However, CNNs are constrained by their limited receptive field, lacking the capability to establish long-range dependencies for the entire DDMs. To address this limitation, this paper proposes a novel model called WaveFormer which utilizes transformer architecture to extract features from DDMs. To evaluate the performance of the developed method, experiments are conducted on Cyclone GNSS (CYGNSS) data and results illustrate that WaveFormer achieves a lower root mean square deviation (RMSD) of 0.452 m than the CNN-based method.
 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.