Dr. Shyam Madhusudhana, OES Student Poster Competition Chair
Col. Normal Miller conceived and brought to life the esteemed Student Poster Competition (SPC) during the 1989 Seattle OCEANS conference. Since its inception, the SPC has remained a prominent highlight of OCEANS conferences worldwide. Welcoming undergraduate and graduate students from esteemed institutions across the globe, the SPC stands tall as a flagship event of the esteemed MTS/OES OCEANS conferences. Each year, we witness a plethora of aspiring talents vying for a spot in the Competition. Through a stringent two-stage review process of their submitted abstracts, we handpick a select group of 15–20 students who demonstrate exceptional promise. These chosen candidates’ conference registration fees are waived, and they also receive financial support to aid their travel and accommodation expenses.
The success of the SPC would not be possible without the generous support of our sponsoring societies — OES and MTS. We extend our heartfelt gratitude to the Office of Naval Research (ONR) for their unwavering financial backing, which has allowed us to continue recognizing the next generation of brilliant minds. The Gulf Coast Section of MTS generously contributed prize money for this edition of the SPC.
The Local Organizing Committee’s (LOC) SPC Chair, Stephen Howden, oversaw running of the SPC at the Gulf Coast OCEANS. This edition of the SPC received 81 abstracts, out of which 22 abstracts were shortlisted for the final program. The poster sessions were very well attended, and the students seemed to have enjoyed their time at the conference. We had a healthy panel of enthusiastic judges who generously offered their time, speaking to each participant and scoring their posters. We are grateful for their support. The awards ceremony was held prior to the exhibitors’ luncheon on the final day of the conference. Participation certificates and winning prizes were handed out by the sponsoring societies’ Presidents—Christopher Whitt (OES) and Justin Manley (MTS).
The list of participants (including the prize winners), together with their affiliation, poster title and an abstract of their poster, are given below.
 First prize (Norman Miller Award) (Certificate and $ 3000)
First prize (Norman Miller Award) (Certificate and $ 3000)
Shihab Hossain Saran, The University of Southern Mississippi, USA
Comparative Analysis of Multiple Nesting Configurations in ROMS within COAWST Modeling Framework Focusing on Oyster Reefs in the Mississippi Sound
Abstract—The oyster reef restoration process in the state of Mississippi has recently culminated because of its decline trends over the past one and a half decades. Two successive years of low salinity in 2018 and 2019 due to the excessive freshwater inflow via the Bonnet Carré spillway opening counteracted the restoration efforts. To make the oyster restoration efforts successful in the Mississippi Sound, more accurate salinity and temperature estimates should be provided within and around the proposed reef locations (Bay St. Louis & Pascagoula Bay) to understand the variability in a broader way. As the Mississippi Sound is a complex estuary, a high spatial resolution of numerical simulation is necessary to capture the physical variability of this region at smaller scales. To provide more accurate results, different configurations of nested simulation (both one-way and two-way) are run using two separate high-resolution (133m) nested grids focusing on the locations of experimental oyster leases; near Bay St. Louis, and near Pascagoula Bay. Significant spatial salinity differences occur among the different nested solutions where the salinity gradients are stronger between the estuarine and shelf water masses in the Pascagoula Bay. One-way and two-way solutions show less spatial salinity differences in the water column of Bay St. Louis nested solution because of the less salinity gradients between the estuarine and shelf water masses due to the high freshwater influx and confined communication between two water masses at Bay St. Louis area. Due to the exchange of information between the parent and nested grids in two-way solution, both solutions show higher correlation coefficients than the one-way solutions when compared with the observed tidal and subtidal salinity data at MDMR Station 9.
 Second prize (Certificate and $ 2000)
Second prize (Certificate and $ 2000)
Andrew Bergey, Grove City College, USA
Underwater Time-of-Flight Camera for Remotely Operated Vehicle Applications
Abstract—This paper describes recent developments in the use of a time-of-flight (ToF) camera for 3D imaging aboard underwater vehicles. We have modified a commercial camera for use underwater with green illuminators and have packaged and deployed this camera as payload aboard a BlueROV2. In this paper, we describe the system hardware, including the 525 nm laser diode illuminator modules, the signal breakout board, and the wide field of view optics. We also show imaging and ranging results from laboratory and field tests with the 3D camera and discuss the challenges introduced by absorption and scattering in turbid water. We show preliminary results from a method for improving imaging in turbid water via backscatter subtraction.
 Third prize (Certificate and $ 1000)
Third prize (Certificate and $ 1000)
Chenyang Zhang, University of New South Wales, Australia
A Low Complexity Channel Emulator for Underwater Acoustic Communications
Abstract—This paper presents a low-complexity channel emulator for underwater acoustic communications. The proposed emulator utilizes Bellhop’s underwater acoustic toolbox to calculate the channel response at the beginning and end of each stationary time interval. It also takes into account the motion of the transmitter and receiver to compute the Doppler factor. It applies a low-complexity resampling method for each path to generate the channel output signals during each stationary interval. This emulator assumes that the channel is doubly selective. To verify the emulator, a software-defined radio platform is used for implementation. The numerical results demonstrate that the proposed emulator achieves higher accuracy and much lower complexity than the existing underwater channel emulator based on Waymark.
 Hameed Ajibade, The University of Southern Mississippi, USA
Hameed Ajibade, The University of Southern Mississippi, USA
Quantifying the Flux of Water Exchange Between- the Mississippi Sound and Bight through the Cat Island Channel Under the Influence of Bonnet Carré Opening
Abstract—The Great Mississippi Flood of 1927 was a major natural disaster in American history, resulting in extensive damage and the displacement of hundreds of thousands of people. As a response, engineers and policymakers sought to find a solution to effectively manage the river’s flow during floods. They ultimately devised the Bonnet Carré Spillway system as a means of achieving this goal. The Bonnet Carré Spillway is a control structure designed to prevent flooding in New Orleans because of high Mississippi River flows during the spring freshet. Opening this structure modifies the dynamism of freshwater by diverting Mississippi River waters into Lake Pontchartrain and subsequently into the Mississippi Sound and Bight. The Bonnet Carré Spillway was opened twice in 2019 (February 27th and April 11th) with each opening lasting for more than 40 days. These two diversions significantly impacted the salinity environment of the MS Sound, resulting in catastrophic die-offs of the extant oyster population.
The Mississippi Sound and Bight is a point of interest to researchers and coastal managers due to the various fisheries and recreational economic engines housed in this region. Protecting these resources from potential hazards has been a top priority for the stakeholders involved. Understanding the northern Gulf of Mexico’s complex circulation pattern and exploring the dynamism and the impact of water exchange between the Mississippi Sound and Bight is an important step in predicting and mitigating future harmful impacts. For this reason, among others, a 400 m resolution, 24-layer circulation model of the Mississippi Sound and Bight was developed. This model is based on a regional application established during the GoMRI-funded CONCORDE consortium (msbCOAWST) and has most recently been applied to assess proposed additional freshwater diversion infrastructure.
For the study presented here, our numerical modeling application is used in conducting a twin experiment with the aim of quantifying the changes in volume fluxes of riverine freshwater flowing into the western Mississippi Sound and how this modified advective patterns and material exchanges with the Mississippi Bight through the Cat Island Channel. The first experiment establishes the state of the Cat Island Channel in terms of calculating the volume fluxes of freshwater from the various regional river sources, such as the Pearl River, entering the Mississippi Bight through the Cat Island Channel. The second experiment seeks to understand the changes in the freshwater volume flux when the Bonnet Carré Spillway is opened. Cat Island Channel is purposely chosen because of its role as an exchange pathway for estuarine (fresh) waters of Mississippi Sound and oceanic (saline) waters of Mississippi Bight; therefore, having a direct effect on the oyster reefs sites adjacent to the Cat Island Channel. Previous studies have involved studying the variability of salinity and temperature state of water mass in this same domain under the influence of Bonnet Carré and diurnal land-sea breeze circulation. These studies have shown that the 2019 diversions have to some great extent impacted the habitat suitability of most oyster beds in the domain of study. In support of the previous studies, this investigation aims at quantifying the freshwater fluxes which were not explicitly determined in earlier research. Having run a long-time simulation of the 2019 model, it was observed that during the first opening, the Bonnet Carré water pushes water eastward and subsequently southward through the Cat Island Channel. For this study, we focus more on the second opening of the Bonnet Carré spillway to examine the impact of the combined 2019 openings of the spillway on regional circulation patterns.
 Puja Banerjee, University of Rhode Island, USA
Puja Banerjee, University of Rhode Island, USA
ROVIA: Automated Underwater Video Highlight Generation using Deep Neural Network
Abstract— Deep-sea video is one of the most important data sources in deep-sea science, but also an extreme challenge for data usage and archiving. With technological advances, underwater videos collected by HOVs (Human Occupied Vehicles), AUVs (Autonomous Underwater Vehicles and ROVs (Remotely Operated Vehicles) produce extreme volumes of data. For general use, underwater dive videos, however, can be sparse, with only a few high-value clips interspersed with hours of video relevant only to specific domains. The process of condensing such high-volume datasets can be time-consuming as human annotators must manually clip videos to identify highlights. Our study develops a portable and field-deployable CNN (Convolutional Neural Network) model to identify potential biological, geological, and operational highlights from long-dive videos. ROVIA is a smart deep-sea video highlight generator that effectively extracts spatiotemporal features linked to camera zooming, organism movement, and changes in optical flow to identify a highlight accurately. This automated highlight generator provides increased efficiency in condensing deep-sea video to aid in archiving and enhance the utilization of the clips for scientific and educational purposes.
 Wai Yen Chan, NTNU, Norway
Wai Yen Chan, NTNU, Norway
Predicting underwater vehicle manipulator system dynamics using time-series methods
Abstract—In this study, we apply two time-series models, Long Short-Term Memory (LSTM) and Vector AutoRgressive with eXogenous Variables (VARX) models to predict underwater vehicle manipulator system (UVMS) dynamics simulated in a ROS/Gazebo environment under two environmental conditions commonly encountered in the wave zone, namely splash zone conditions, and wave loads on the UVMS when it is fully submerged, but close to the surface of the water. We also investigate the effect of dataset size and heterogeneity on the performance of these models.
 Jingjing Chen, Zhejiang University, China
Jingjing Chen, Zhejiang University, China
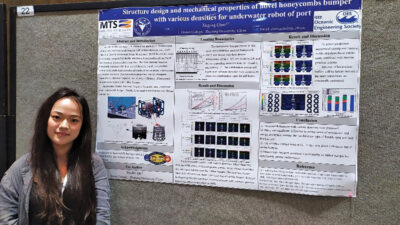
Structure design and mechanical properties of novel honeycombs bumper with various densities for underwater robot of port
Abstract—In this paper, honeycomb bumpers with various densities were proposed, which absorb impact energy and provide support in engineering application of underwater robot of port. The Honeycomb bumper was based on Double Arrowhead Wings Honeycomb (DAWH) cell, which were mainly composed of double arrowhead honeycombs cell and fused with re-entrant honeycombs connection. In order to achieve longitudinal variable density and gradient design, the number of cell layers, cell size, number of cells, and connection positions in the longitudinal direction of the honeycomb dumpers exhibited difference. The finite element model of honeycomb dumpers with three typical densities based on equivalent method were established and selected matrix of polyurethane with resistant to seawater corrosion. The mechanical properties, energy absorption characteristic, dynamic response, and structure efficiency of honeycomb dumpers were studied with rubber bumper. The mechanical properties, energy absorption, deformation mode, section plane, and strain energy were recorded and discussed. The stress and energy absorption of the structure increased with the increase of cell combination diffusion angle and cell density. Honeycomb dumpers possessed a cost similar to rubber bumper but significantly greater performance, which were of great significance for the application of underwater robot of port and coastal engineering.
 Olagoke Daramola, The University of Southern Mississippi, USA
Olagoke Daramola, The University of Southern Mississippi, USA
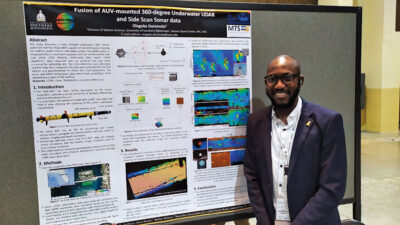
Fusion of AUV-mounted 360-degree Underwater LiDAR and Side Scan Sonar data
Abstract—Recent advancements in mapping coastal waters have birthed underwater bathymetric LiDAR systems, addressing the limitations of energy loss through the interaction of light with the air-water interface by Airborne bathymetric LiDAR systems. This study introduces an innovative and compact underwater 360° Pulsed Laser Line Scanner (PLLS-360°) system. This system boasts a 360° scanning angle and a 360° field-of-view (FOV) receiver, providing its ability to map the seafloor, water column, and water surface simultaneously thereby enhancing its utility in various scenarios. The PLLS-360° is suitable for diverse applications such as seafloor mapping, underwater asset inspection, and construction progress monitoring. The LiDAR system is integrated with an Iver3 AUV equipped with an interferometric side scan sonar (SSS) allowing LiDAR-sonar data fusion. A test involving mapping an artificial reef site at the Blue Heron Bridge in Florida, was carried out. The acquired LiDAR raw waveforms were corrected for spreading loss as the light returned from the target to the LiDAR receiver. The peak intensities of the corrected waveforms were detected, and the ranges were calculated from the peak position. The range was corrected for the AUV motion and georeferenced to obtain the final bathymetry. The sonar image and bathymetric data were fused, providing a more detailed description of the seafloor.
 Catherine Deschênes, Norwegian University of Science and Technology, Norway
Catherine Deschênes, Norwegian University of Science and Technology, Norway
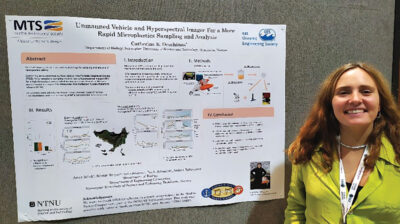
Unmanned vehicle and hyperspectral imager for a more rapid microplastics sampling and analysis
Abstract—In this paper, we present a proof-of-concept study aiming to improve the sampling and analysis of microplastics (MPs) by implementing a novel methodology combining an autonomous surface vehicle and a near-infrared hyperspectral imager (HSI). The field study was conducted from the 2nd to the 5th of August 2022 at Runde – a well-known bird preservation island on the Western coast of Norway. Over 35 samples from two different locations (Exposed (A) and Sheltered (B)), MPs concentration was at its highest (0.511 MPs/m3) in location A. During the four days of sampling, at least 25 % of the data did not detect any MPs (0 MPs/m3). Thus, we showcase an easy repeatable method towards the assessment of high variable MPs concentration using a Portable Catamaran Drones (PCD) and a near-infrared hyperspectral imager (HSI). The results from HSI were compared against Attenuated Total Reflection Fourier-Transform infrared (ATR-FTIR). No significant difference (P > 0.05) found at location A indicated that both instruments can provide accurate MPs concentration. A potential future correlation between MPs concentration and Key Environmental Variables (KEVs) could help to contribute to the modeling and policymaking world.
 Akshaj Gaur, University of Maryland, USA
Akshaj Gaur, University of Maryland, USA
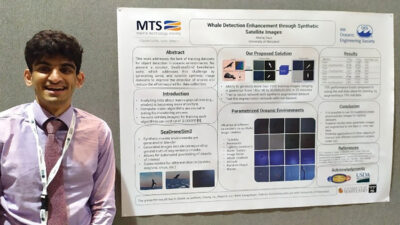
Whale Detection Enhancement through Synthetic Satellite Images
Abstract—With a number of marine populations in rapid decline, collecting and analyzing data about marine populations has become increasingly important to develop effective conservation policies for a wide range of marine animals, including whales. Modern computer vision algorithms allow us to detect whales in images in a wide range of domains, further speeding up and enhancing the monitoring process. However, these algorithms heavily rely on large training datasets, which are challenging and time-consuming to collect particularly in marine or aquatic environments. Recent advances in AI however have made it possible to synthetically create datasets for training machine learning algorithms, thus enabling new solutions that were not possible before. In this work, we present a solution – SeaDroneSim2 benchmark suite, which addresses this challenge by generating aerial, and satellite synthetic image datasets to improve the detection of whales and reduce the effort required for training data collection. We show that we can achieve a 15% performance boost on whale detection compared to using the real data alone for training, by augmenting a 10% real data. We open source 1 both the code of the simulation platform SeaDroneSim2 and the dataset generated through it.
 Rhyan Grech, Rutgers University, USA
Rhyan Grech, Rutgers University, USA
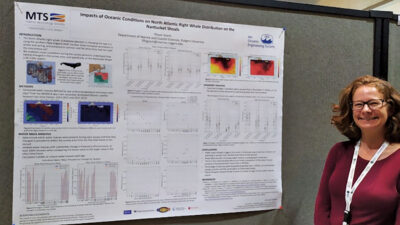
Impacts of Oceanic Conditions on North Atlantic Right Whale Distribution on the Nantucket Shoals
Abstract—The habitat of North Atlantic right whales, like that of countless other species, is changing as a result of a changing climate. As scientists, proactive policy makers and innovative industries look for climate change solutions, the ocean is seen as providing myriad opportunities in the new blue economy. Offshore wind offers a promising alternative to fossil fuels, but impacts of turbine surveying, construction and operation on right whales are still largely unknown. Over the past decade, researchers at the Anderson Cabot Center for Ocean Life at the New England Aquarium have documented changes in right whale distribution in a historic whaling area overlapping with planned offshore wind development on the southern New England shelf. During a decade of aerial surveys, right whales began using the area year-round, with increasing abundance trends found in winters and springs. This study examined changes in oceanic conditions on the southern New England shelf and Nantucket Shoals with a potential relationship to the right whale abundance shifts between 2013 and 2019. Maps of coastal water masses and the fronts between them provided by satellite data are the basis for this comparative study. We identified water masses and their gradients during each season prior to 2016, and each season after 2016. The number of unique water masses and associated statistics were calculated for each season, which suggested a trend of convergence of seasonal averages of unique daily water masses in the survey area. We also compared which specific water masses were present prior to 2016 with those afterward, and analyzed the characteristics of those that exhibited substantial changes. Results suggest an overall cooling of water in the study area during winters and falls, and an overall warming during springs. Gradient values increased during spring, summer and fall months from the first time frame to the second. The percentage of area in which strong gradients were found increased meaningfully in summer and fall on the Nantucket Shoals. The goal of this study was to further understand the dynamic habitat of an imperiled species to contribute to the creation of tools for responsible wind energy development. While a transition away from fossil fuels will mitigate climate change impacts, strong preservation policies must be simultaneously enacted to protect right whales as new energy infrastructure is added to their environment.
 James Hawkins-Dady, University of Southampton, UK
James Hawkins-Dady, University of Southampton, UK
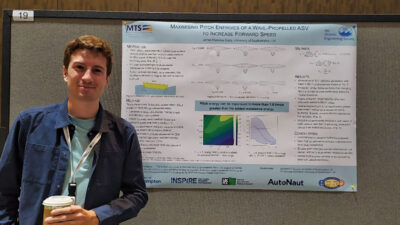
Maximising Pitch Energies of a Wave-Propelled ASV to Increase Forward Speed
Abstract—Pitch-driven, wave-propelled vessels are able to use the energy contained solely within the waves to propel themselves across theoretically unlimited distances. For this type of platform, maximising the energy harnessed from the environment and transferred to the vessel’s pitch motions is important for increasing forward speed. In this paper, a parametric range of hullforms based on a Wigley hull is analysed in terms of the average energy-per-second in the pitch motions and the average energy lost to added resistance. This reveals that there exists a range of hullforms where the energy in the pitch motions can be 1.6 times greater than the energy lost to added resistance. The analysis is repeated over a range of vessel drafts, which reveals that a beam to draft ratio of less than 3 allows a hullform to be designed to achieve this effect. This work indicates that the hullform is a crucial part of the functioning of a wave-propelled vessel, and it can be designed to maximise energy harnessed from the waves. Provided this energy is effectively transferred to the foils, it can lead to an increase in forward speed.
 Bharat Joshi, University of South Carolina, USA
Bharat Joshi, University of South Carolina, USA
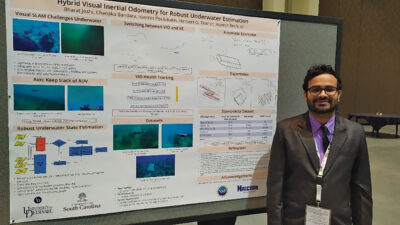
Hybrid Visual Inertial Odometry for Robust Underwater Estimation
Abstract—Vision-based state estimation is challenging in underwater environments due to color attenuation, low visibility and floating particulates. All visual-inertial estimators are prone to failure due to degradation in image quality. However, underwater robots are required to keep track of their pose during field deployments. We propose robust estimator fusing the robot’s dynamic and kinematic model with proprioceptive sensors to propagate the pose whenever visual-inertial odometry (VIO) fails. To detect the VIO failures, health tracking is used, which enables switching between pose estimates from VIO and a kinematic estimator. Loop closure implemented on weighted posegraph for global trajectory optimization. Experimental results from an Aqua2 Autonomous Underwater Vehicle field deployments demonstrates the robustness of our approach over different underwater environments such as over shipwrecks and coral reefs. The proposed hybrid approach is robust to VIO failures producing consistent trajectories even in harsh conditions.
 Yachen Li, Rutgers University, USA
Yachen Li, Rutgers University, USA
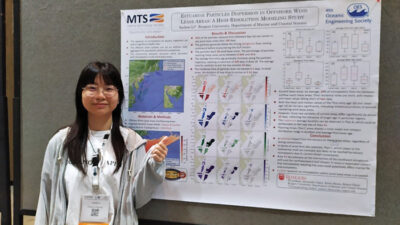
Estuarine Particles Simulations: the Connection Between Delaware Bay and Offshore Wind Lease Areas
Abstract—The issue of microplastics is becoming increasingly severe; meanwhile, there is a surge in the construction of offshore wind farms. The base of wind turbines can act as artificial reefs, playing a positive role in facilitating the proliferation of a variety of marine organisms and the establishment of ecosystems. However, the potential impact of microplastics from estuaries on the ecosystems within wind farms is concerning. In this study, we use the particle tracking model ROMSPath to perform a simulation tracking the trajectories of 3650 particles over a year to reveal the connectivity from Delaware Bay to offshore wind lease areas located in the Mid-Atlantic Bight. The results suggest that 92% of the particles released from Delaware Bay did not remain in any wind lease areas after 180 days. A total of 26 wind lease areas were reached by the particles, with the area hosting the highest percentage capturing up to 41% of the particles. The particles were released from the Delaware River near Wilmington, DE and it took a minimum of 54 days for them to reach the wind lease area nearest to the bay mouth. The average residence time of the particles ranges from 0.14 to 6.5 days, indicating it would be reasonable to assume a particular impact from estuarine outflow on the wind lease area ecosystems. This study provides a reference for understanding estuarine particles’ dispersion and migration patterns entering offshore wind development zones.
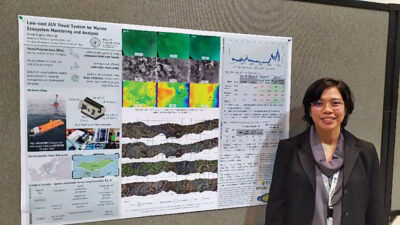 Marie Angelyn Mercado, The University of Tokyo, Japan
Marie Angelyn Mercado, The University of Tokyo, Japan
Low-cost AUV Visual System for Marine Ecosystem Monitoring and Analysis
Abstract—Marine protected areas (MPAs) play a vital role in safeguarding marine ecosystems and preserving their ecological and societal benefits. Japan, with its expansive marine territory, has designated a substantial area as MPAs. However, monitoring and analyzing these vast regions present challenges, necessitating significant resources and workforce. In recent years, the use of low-cost Autonomous Underwater Vehicles (AUVs) has emerged as a promising approach for data collection in MPAs, especially when coupled with visual data collection. This study aims to develop a cost-efficient visual system to attach to a low-cost AUV, enabling effective data gathering and analysis for ecological and economic purposes. Algorithms that use monocular and stereo image inputs were used to generate data such as 3D mosaic of the seafloor and dimension estimation of marine animals. By utilizing easy-to-obtain hardware visual systems, this research contributes to enhancing the efficiency and cost-effectiveness of data collection and analysis of MPAs.
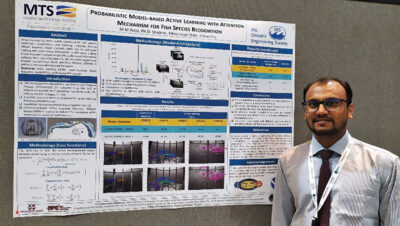 M M Nabi, Mississippi State University, USA
M M Nabi, Mississippi State University, USA
Probabilistic Model-based Active Learning with Attention Mechanism for Fish Species Recognition
Abstract—Accurate fish species identification is essential for stock assessments, production management, document ecosystem changes, and protection of endangered species. Image processing and computer vision techniques have been widely employed for fish species detection, classification, and tracking, reducing human efforts in these tasks. However, these methods often rely on extensive training data with correct annotations. Annotating many images captured from marine environments poses a significant challenge. This work proposes a deep-learning model designed for fish detection and classification. The model incorporates an attention mechanism named Convolutional Block Attention Module (CBAM) to improve detection performance. A popular Deep Active Learning approach with cost-efficient annotation is employed, which selects the most informative samples from the unlabeled set. The proposed method utilizes probabilistic modeling based on mixture density networks to estimate probability distributions for localization and classification heads. This study uses the Southeast Area Monitoring and Assessment Program Dataset 2021 (SEAMAPD21). Our model is compared with the conventional supervised algorithm. Experimental results demonstrate superior detection accuracy, achieving a mean average precision (mAP) of 41.6% with minimal labeled data, compared to traditional supervised approaches (mAP-36.7%) that rely on larger labeled datasets. The active learning method with the attention module effectively reduces annotation costs while maintaining excellent detection accuracy. Overall, our proposed deep active learning model with an attention mechanism proves to be highly effective for fish species recognition, providing significant advancements in accuracy and cost efficiency for fish detection tasks.
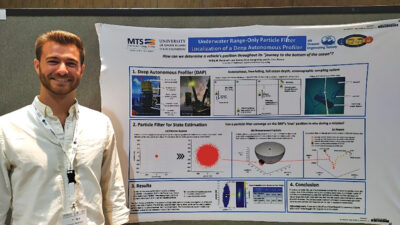 Phillip Parisi, University of Rhode Island, USA
Phillip Parisi, University of Rhode Island, USA
Underwater Range-Only Particle Filter Localization of a Full Ocean Depth Autonomous Profiler
Abstract—Autonomous marine vehicles of various types have become essential tools for oceanographic research, enabling in-situ data collection in challenging marine environments. However, accurately determining the position of a vehicle during underwater missions remains a challenging problem which limits the effectiveness of data collection. This study utilizes a particle filter- based localization method for the hadal-rated Deep Autonomous Profiler (DAP). Our particle filter approach successfully estimates the DAP’s position throughout its deployment using range only acoustic measurements. The computational efficiency allows for real-time implementation, making it suitable for a range of operations scenarios and other vehicles. The particle filter-based localization can provide precise placement of in-situ measurements and data collection, opening new opportunities for exploration and data-driven decision-making in marine sciences.
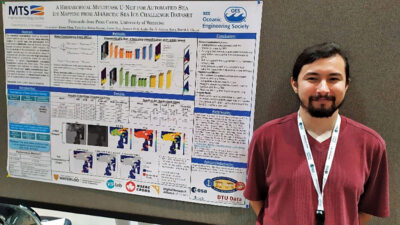 Fernando Pena Cantu, University of Waterloo, Canada
Fernando Pena Cantu, University of Waterloo, Canada
A Hierarchical Multitask U-Net for Automated Sea Ice Mapping from AI4Arctic Sea Ice Challenge Dataset
Abstract—Sea ice monitoring is a vital task for various applications, such as climate research, ship navigation, and Arctic sea route planning. However, manual generation of sea ice condition maps using synthetic aperture radar (SAR) imagery is time-consuming and labor intensive. To address this issue, the European Space Agency (ESA)-lab has created the AutoICE challenge with the AI4Arctic Sea Ice Challenge Dataset provided, which aims to develop deep learning (DL) models capable of producing segmentation maps for ice concentration (SIC), stage of development (SOD), and floe size (FLOE). Among different DL-based models, U-Net is a popular choice used for different sea ice segmentation tasks. However, the ice-water boundaries predicted by U-Net are not always the same between the three different tasks. In this paper, we investigate two methods to address this inconsistency and assess their impact on the model’s performance. The first method is the introduction of a new loss function, the water consistency loss, which penalizes inconsistencies in the open-water class between the three outputs. The second method is to use a hierarchical U-Net, which first segments water and ice and then classifies the ice regions into finer categories. The results show that both approaches eliminate the inconsistencies between tasks effectively.
 Advaith Sethuraman, University of Michigan, USA
Advaith Sethuraman, University of Michigan, USA
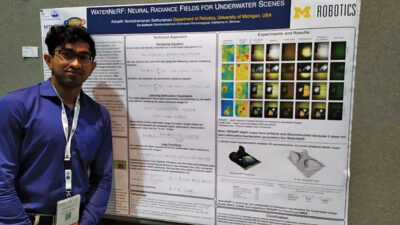
WaterNeRF: Neural Radiance Fields for Underwater Scenes
Abstract—Underwater imaging is a critical task performed by marine robots for a wide range of applications including aquaculture, marine infrastructure inspection, and environmental monitoring. However, water column effects, such as attenuation and backscattering, drastically change the color and quality of imagery captured underwater. Due to varying water conditions and range-dependency of these effects, restoring underwater imagery is a challenging problem. This impacts downstream perception tasks including depth estimation and 3D reconstruction. In this paper, we leverage state-of-the-art neural radiance fields (NeRFs) to enable physics-informed novel view synthesis with image restoration and dense depth estimation for underwater scenes. Our proposed method, WaterNeRF, estimates parameters of a physics-based model for underwater image formation and uses these parameters for novel view synthesis. After learning the scene structure and radiance field, we can produce novel views of degraded as well as corrected underwater images. We evaluate the proposed method qualitatively and quantitatively on a real underwater dataset.
 Mathis Grangeon, IMT Atlantique, France
Mathis Grangeon, IMT Atlantique, France
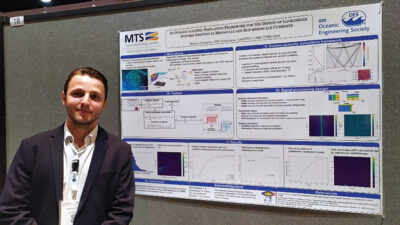
An Oceano-acoustic Simulation Framework for the Design of Lagrangian Systems Drifting in Mesoscale and Sub-mesoscale Currents
Abstract—Sub-mesoscale currents are of great interest for oceanographers but unfortunately their observation is a very difficult task. Lagrangian systems can be used to monitor them and require the implementation of an acoustic signal processing chain leading to the localization of each node of that system. In order to help the design of the Lagrangian system prior to sea trials, a simulation framework coupling the results of an oceanographic model with a ray trace software is presented. To illustrate the benefit of this framework, an experimental set-up composed of 5 sources and 20 floats which are drifting for 15 days is analyzed. A dataset of 358,000 frequency responses reflecting sub-mesoscale dynamics is built up. From this dataset, relevant statistics are calculated to define the best transmission parameters of the acoustic sources and to choose the right ranging method. It turns out that using pseudo-random sequences and allocating the spectral resources with Code Division Multiple Access method is a relevant design in our context. Also, it appears that a non-coherent ranging processor gives the best performance.
 Jaxon Wiley, Clemson University, USA
Jaxon Wiley, Clemson University, USA
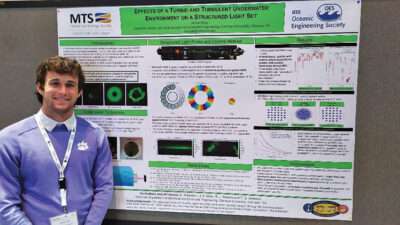
Effects of a Turbid and Turbulent Underwater Environment on a Structured Light Set
Abstract—Real-world underwater environments present obstacles to optical systems including turbulence and turbidity. The effects of scattering and underwater turbulence on an optical system are observed simultaneously to optimize the propagation of structured beamlets through these conditions with minimized distortion.
 Zhiding Yang, Memorial University of Newfoundland, Canada
Zhiding Yang, Memorial University of Newfoundland, Canada
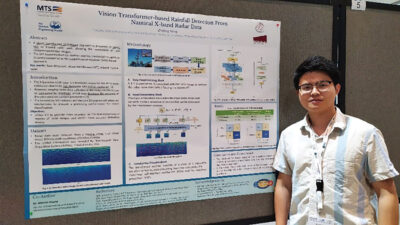
Vision Transformer-based Rainfall Detection From Nautical X-band Radar Data
Abstract—Due to the sensitivity of the X-band signal to rain, rain may affect the precision of oceanic parameters retrieval from X-band marine radar images. In this paper, a vision transformer (ViT)-based approach is proposed to detect rain in X-band radar data, allowing the recognition of rain-contaminated radar images. Given its ability to capture long-range dependencies in images and model global context effectively, ViT is considered as a promising alternative to convolutional neural networks (CNNs) for radar image classification tasks. Each radar image is first preprocessed and then separated into patches. They are subsequently flattened and embedded to form a sequence that is supplied to the transformer encoder block. Then, the outputs from the transformer encoder are aggregated to obtain the final classification result. The data in this study were acquired using a shipborne Decca marine radar system from south-southeast of Halifax, Canada. The real-time precipitation information was provided by a Non-Acoustic Data Acquisition System (NADAS) installed on the ship. The experiment results demonstrate that the ViT-based approach achieves a relatively superior rainfall recognition precision of 98.5% compared with the support vector machine (SVM)-based approach.
 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.