
Gabriele Ferri1 and Fausto Ferreira2
1 ERL Emergency 2019 Director 2 OES AdCom 2018-2020
NATO-STO Centre for Maritime Research and Experimentation (CMRE) has been organizing Student AUV Challenge – Europe (SAUC-E), the premier European student competition for underwater vehicles, since 2010. Over the years, we have been fostering the use of heterogeneous robots in our competitions. In SAUC-E we have given teams the possibility to also deploy marine surface vehicles, introducing tasks that required robot cooperation. In fact, only teams composed of cooperative heterogeneous robots can be effective in solving complex tasks in real world scenarios. This interest led CMRE to locally organize the euRathlon 2015 Grand Challenge at Tor del Sale power plant site (Piombino, Italy) in September 2015. euRathlon 2015 Grand Challenge, organized in the framework of the euRathlon EU project, was the first world’s multi-domain robotics competition. Disaster response tasks were proposed to teams composed of land, sea and air robots. The inspiration came from the Fukushima 2011 accident.
This formula of multi-domain competitions has continued with the European Robotics League (ERL) Emergency. ERL is a common framework for robotics competition funded by the European Union. ERL was launched in 2016 in three vibrant fields of robotics: industrial, service and emergency robots. The first season culminated with the ERL Emergency 2017, a multi-domain competition again locally organized by CMRE at the Tor del Sale power plant site in Piombino. Since 2018, supported by the SciRoc project, the ERL concept has been extended to Smart City environment.
The competition

CMRE hosted also this year the annual European Robotics League Emergency 2019 robotics competition from 14 to 19 July. SAUC-E 2019 was integrated in the competition. ERL Emergency 2019 was a double domain competition where land robots and AUVs could participate. The areas of robot operations included a building with the surrounding outdoor space for land robots and the CMRE water basin for underwater robots. The areas were prepared to simulate a yacht accident in a harbour connecting it to the general theme of the SciRoc project: Smart Cities. Tasks similar to those present in ERL Emergency 2017-2018 were proposed to teams. Land robots had to survey the outdoor area detecting colored markers, to localize pipes and a mannequin representing a missing worker. Then, inside the building, the robots had to find and close a valve and to detect a canister. They were asked to move the canister to a simulated fire location in the outdoor area.
Underwater robots inspected a pipe structure, passed through validation gates and searched for a missing person underwater, represented by a realistic mannequin. This year we added several buoys of four possible colors. The buoys had to be detected, localized and their color recognized. A different action was requested to the teams depending on the buoy color: for instance, turning around the buoy in a clock-wise circle or stopping for 30 seconds increasing the depth. The objective was to force teams to integrate perception with adaptive mission planning in a realistic environment such as CMRE water basin. As in the previous SAUC-E editions, the challenges were held at the CMRE waterfront sea basin, which is a sheltered harbor that offers participants the opportunity to grapple with real-life sea conditions, including limited visibility and salty water, but within a safe, controlled environment. The limited visibility added severe difficulties to object recognition by AUVs, even if the targets were bright orange or red in color.
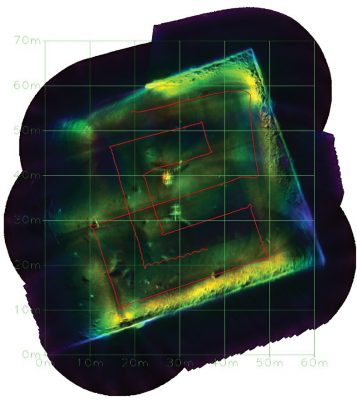
Nonetheless, several teams were able to tackle the tasks, achieving many goals. Out of the 5 marine teams registered, all tested their vehicles in the water. We tried to provide the teams as much time as possible to test their robots in the water basin. Only testing the robots in the water can allow teams to solve the technical issues and to prepare the robots for the proposed tasks. To support the practice at sea, a test arena containing the objects to be detected was also prepared next to the competition area. This allowed the teams to collect data, for instance to acquire images of the colored buoys to train and test their classifiers.
One of the interesting things we have noticed is the evolution of the teams over the past years. We have seen significant and steady progress from year to year in several teams and a constant look for improvement. For instance, AUV Team TomKyle learned a lesson from last year when their DVL broke. So, they brought a new and lighter vehicle not relying on a DVL for its navigation. For its navigation, they developed a laser altimeter system which led them to win the IEEE OES Innovation Award. At the same time, they brought the vehicle used in past editions as backup, which they had to use due to an issue with their newer vehicle. Another team that showed steady progress since last year’s first participation was Team Bath Marine Drones. Last year the team components were few and they had some basic issues that prevented them to barely go to the water. This year’s performance was improved. The vehicle was more robust and they reached the sea after a couple of days. They are creating a robotics club in which knowledge is passed from one generation to the next one. For this reason, we expect them to be competing for some higher places next year.
The participant teams
This year we limited the number of teams to 8 teams (4 land and 4 sea) due to the logistics involved for a double domain competition in the La Spezia site. 9 teams applied and 7 teams finally participated. The marine domain had 5 teams while the land part had 3 teams. One of the teams had two domains. Some of the teams matched to form multi-domain teams. At the end, 3 multi-domain teams were present. Of the competing teams, 5 had previously participated in our competitions, showing how ERL/SAUC-E is today a fixed appointment for several European research groups. Moreover, one of the teams had been away from the competition for 1 year and came back this year; a new entry from 2018 came back and a team led by a previous participant in 2012 (now mentor) participated for the first time, which highlights that the competition can be a strong stimulus for research groups to continue working on underwater vehicle technology.

The participant teams were:
- AUV Team Tom Kyle (sea); from the University of Applied Sciences of Kiel, Germany. This team has participated since 2014 in our competitions yearly. They competed together with TELEROB in the double-domain challenges.
- MSAS (land); the MSAS land team comes from Poland. They participated previously in 2015 and 2017 and 2018. They competed together with UNIFI in the double-domain challenges.
- SEAL (sea + land); from EPITA in Paris, France. This team participated for the first time showing that the competition continues to attract new teams. Moreover, it was the only team with both domains.
- Team Bath Marine Drones (sea); from the University of Bath, UK. After winning the best rookie award in 2017, this year the team came back with an improved vehicle.
- UNIFI Team (sea); from the University of Florence, Italy. A veteran of our competitions (first participation in 2012). They competed together with MSAS in the double-domain challenges.
- KN Robocik (sea); from the Wroclaw University of Technology in Poland. Another first-time participation.
- TELEROB (land); the TELEROB team comes from Germany. Participated previously in euRathlon 2013, 2015 and ERL Emergency 2017 and competed together with AUV Team TomKyle in the double-domain challenges.
The winners
The winners of the ERL Emergency 2019 sea + land Tournament were:
- 1st Place – AUV Team TomKyle + TELEROB.
- 2nd Place – UNIFI Robotics Team + MSAS.
- 3rd Place – SEAL.

Other prizes awarded were:
- IEEE OES Innovation award: AUV Team TomKyle.
- “Best Rookie Award” – KN Robocik.
- “Persistency Award” – Team Bath Marine Drones.
- “Multi-domain Robonation award” – SEAL.
- “Best Marine Team Award” – UNIFI Robotics Team.
- “Best Land Team Award” – TELEROB.
- “Best Presentation Marine” – AUV Team TomKyle.
- “Best Presentation Land” – MSAS.
Parallel events
This year, we had a rich parallel program of events. First of all, the teams were received with a barbecue after long trips on the road. This was important to start creating a fair play spirit and good companionship among new and old teams.

In order to provide a better learning experience for the teams, we have setup a program of short talks. Dr. Bill Kirkwood from MBARI (U.S.) spoke about how to educate engineers through robotics competitions and challenges and what competitions can bring to students and the community. Prof. Shinji Kawatsuma, from the Fukushima College in Japan, gave the audience some lessons learned from the robotics intervention after the Fukushima Daiichi Nuclear Power Plant accident in 2011. The talk was an interesting way of learning about the real-world problems of intervention robots. Finally, Mr. David MacKay from Kongsberg (Norway) introduced the EELUME Sub-sea resident AUV for inspection, maintenance and repair, which gave an industry perspective on marine robotics.
Moreover, in collaboration with the School of Robotics of Genova (Italy), the organizer of “Olimpiadi di Robotica” (Robot Olympics), we have had the participation of three high school teams. These teams won the Olimpiadi di Robotica competition, an event sponsored by the Italian Ministry of Research and Education and each of them had a robot for one domain (sea, land and air). They had the opportunity of performing a small demo and of introducing their robots to a pool of international judges. One interesting aspect is that their robots were also designed for emergency response. For instance, the team Hydrocarbot designed an Unmanned Surface Vehicle (USV) for oil spill mitigation using a nano-techonology-based spounge made by the Italian Institute of Technology (IIT). The team from ITIS Giorgi brought a small land vehicle that albeit looked like a simple RC car it had a large suite of sensors for measuring essential info in a disaster scenario such as gas, temperature and radioactivity levels.
The local community was also engaged. CMRE’s staff member families were invited to attend the event, which made many kids very happy and excited. Local schools from the La Spezia area were also involved in the framework of Giona’s Project. This allowed around 20 students close to high school graduation to come and interact with the teams.
Media coverage

A press release and a press kit in Italian was distributed to local and national press on 15 July. This led to 3 articles on the 16th (1 printed media, 2 online) introducing the competition. A Media Day was also established for Friday 19th. Several journalists attended leading to two printed articles in regional newspapers and a TV news on the regional channel Rai3 (https://www.rainews.it/tgr/liguria/notiziari/video/2019/07/ContentItem-a080b6a9-993d-43d3-abe7-bea2261df4a0.html).
In parallel, we had a strong investment in the social media channels with daily posts on the CMRE’s Facebook and Twitter profiles, on the SAUC-E FB page, on the ERL FB page and on the IEEE OES FB page. Besides CMRE’s staff, part of this effort was possible through the IEEE OES Social Media Initiative. Short interviews were made with teams and judges and will be published soon.
Feedback
The feedback from both the participants and the judges was very positive. A post-event survey was filled by the participants on the spot and the results show that most participants liked the competition, the helpfulness of the staff and are interested to participate again. In particular, over 73% of the participants rated the event as excellent or very good and over 80% considered it extremely or very organized. The staff was deemed extremely helpful by almost two thirds of the participants and very helpful by a third. The duration was considered about right for over 80% of the attendees that answered the survey. The location and facilities were given 4 or 5 stars by over 70% of the respondents. Over 50% of the attendees gave an extremely likely probability of recommending the event to a friend or colleague. Finally, while almost half of the participants considered the tasks hard, 86% considered them interesting or very interesting.

In terms of technical feedback, as the competition becomes harder and harder every year (in order to push the state of the art), some participants are in favor of keeping or creating some simple tasks for the newcomers. Another topic that came out as feedback is to promote more the autonomy in the land domain. While at sea, vehicles need to be fully autonomous (no ROV mode is allowed), in the land domain some tasks can be performed tele-operating the robot (such as manipulation and partially navigation). Tele-operation is important for some end-users, such as firefighters or rescue teams, that prefer to have the human-in-the-loop. Teams more interested in research in autonomy would like to see more points awarded to autonomous achievements. This is a trade-off that we will try to balance to make sure the best research teams are attracted while having still a realistic scenario (close to end-users).
The judges
This year we had a large pool of judges and visitors coming from all over Europe, Asia and the U.S. We are pleased to thank IEEE OES, CNR-INM (Italy), Jacobs University (Germany), CATEC (Spain), SPAWAR (U.S.), ENEA (Italy), University of Limerick (Ireland), National University of Singapore (Singapore), Kongsberg (Norway), University of Pisa (Italy), National Oceanographic Centre (NOC) (UK), Robonation (U.S.), Office of Naval Research (ONR) (U.S.) and the University of Zagreb (Croatia), who provided exceptionally qualified judges, increasing the quality of the competition. Dr. Bharhat Kalyan and Rajat Mishra, two organizers of the SAUV-C competition in Singapore, were part of the judges and visited us in the framework of the IEEE OES committee Marine Autonomous Systems Competitions Coordination (MASC2), working globally to standardize student marine robotics. Dr. Bill Kirkwood also presented a plaque in appreciation for the organisation of the competition to the local organising committee.
Sponsors
IEEE OES played a fundamental role as the Main Sponsor. One of the ERL goals is to educate future multi-disciplinary engineers. Therefore, the sponsorship of ‘Breaking the Surface’ 2019, the 11th Interdisciplinary Field Workshop of Marine Robotics and Applications, is well aligned with our mission. The organizers of ‘Breaking the Surface’ provided 2 complimentary registrations to the best rookie team, 1 as persistency award and 1 to the best presentation from a marine team. These students will have the opportunity to participate in the 11th edition of this multi-disciplinary and educational workshop that, since 2019, counts with the IEEE OES sponsorship. Robonation sponsored the Multi-domain Robonation prize, awarding the efforts of the only institution presenting robots for both domains.
Like in 2018, we had again the marine robotics commercial sector involved. Blue Robotics gave a Ping echosounder to the Best marine team as well as three vouchers for their online shop to the teams that won the Persistency award, the Best rookie and to the second-best marine team. This support is fundamental to help these teams improve their vehicles for the next editions.
Our aim is to continue to develop ERL Emergency as a unique event that challenges teams with realistic conditions, with an emphasis on multi-vehicle cooperation (through double and three domain competitions). These achievements were made possible thanks to the fundamental support of IEEE OES and all our other sponsors. We thank all the teams, judges, presenters, visitors, staff and everyone involved, who made ERL Emergency 2019 such a successful event.

 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.