Dr. Shyam Madhusudhana, OES Student Poster Competition Chair
Photo credits: Manu Ignatius


Col. Normal Miller envisioned and created the Student Poster Competition (SPC), and it was first implemented at the Seattle OCEANS conference in 1989. It has been a feature of OCEANS conferences ever since. Open for participation to undergraduate and graduate students from colleges and universities around the world, the SPC is a flagship event of the MTS/OES OCEANS conferences. From the pool of aspiring applicants, typically 15-20 students are selected to participate in the Competition, based on two stages of reviews of their submitted abstracts. Selected candidates enjoy a waiver of conference registration fees and receive financial support towards their travel and accommodation costs. We thank the Office of Naval Research—Global (ONR-G) for their continued financial support of SPCs. The prize money for this edition of the SPC was provided by the sponsoring societies OES and MTS.

The Halifax OCEANS’ Local Organizing Committee’s (LOC) SPC co-Chairs Jordan Ross and Amy Deeb bravely decided to have “more than a full house” and invited more than the usual 20 candidates to the final round of the Competition. Out of over 110 submissions received, 21 abstracts were shortlisted for the final program. One of the candidates could not present due to issues with procuring a visa in time. A large faction of participants was from North America—6 from the USA and 4 from Canada. Asian participants included 3 from Japan, 1 from China, and 1 from India. There were 2 participants each from Italy and the UK and 1 from Germany. The poster sessions were very well attended, and the students seemed to have enjoyed their time at the conference. We had a panel of 5 judges who generously offered their time, speaking to each participant and scoring their posters. We are grateful for their support. The awards ceremony was held prior to the exhibitors’ luncheon on the final day of the conference. Participation certificates were awarded to all participants. The top three winners received cash prizes along with attractive plaques.
The list of participants (including the prize winners) together with their affiliation, poster title and an abstract of their poster are given below. Apologies to the participants whose photos aren’t included.
First prize (Norman Miller Award) (Certificate and $3,000)
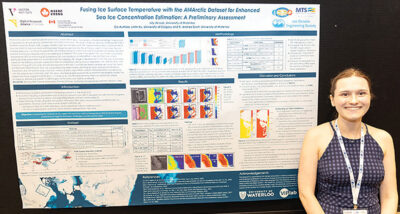 Lily de Loe, University of Waterloo, Canada
Lily de Loe, University of Waterloo, Canada
Fusing ice surface temperature with the AI4Arctic dataset for enhanced sea ice concentration estimation: A preliminary assessment
Abstract—While Arctic sea ice mapping supports several key applications (e.g., navigation, climate monitoring), its accuracy is impacted by remote sensing uncertainties and data limitations. The recent AI4Arctic dataset combines Sentinel-1 Synthetic Aperture Radar (SAR) imagery, AMSR2 brightness temperature (TB) measurements, ERA-5 reanalysis data, and ice charts to improve deep learning-based mapping approaches. Nevertheless, AI4Arctic excludes thermal infrared data and it is critical to explore the use of these products, which may improve predictions where SAR and passive microwave measurements are challenging to interpret. This study investigates the use of VIIRS ice surface temperature (IST) for improving SIC predictions. Our work builds on a competitive U-Net architecture, which estimates three parameters for automated sea ice mapping: SIC, stage of development, and floe size. A 30-scene subset of the AI4Arctic dataset is selected based on established criteria, and co-registered with VIIRS IST data. The impacts of fusing IST with other remote sensing data at the input- and feature-levels are explored using two fusion architectures. Experimental trials are conducted using these models, spanning six input channel combinations. Predictions are compared using evaluation metrics and SIC maps. When using IST measurements in combination with the original input channels, both the input- and feature-level approaches outperform the baseline model. This preliminary study suggests that IST data, in combination with TB measurements, improves predictions where ambiguous textures are present in SAR imagery or PM data is not able to contribute.
Second Prize (Certificate and $2,000)
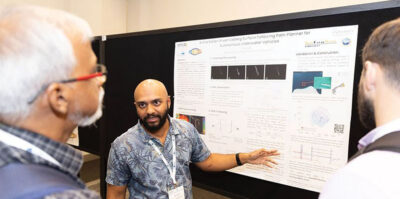 Tony Jacob, University of Rhode Island, USA
Tony Jacob, University of Rhode Island, USA
Active Sonar-Driven Iceberg Wall Following Path Planner for Autonomous Underwater Vehicles
Abstract—Autonomous Underwater Vehicles (AUV) are potential candidates for mapping icebergs in a safer manner compared to using manned ships. However, iceberg drifts and irregular contour pose challenges for AUVs when maneuvering around the iceberg at a constant stand off distance autonomously. To this end, in this paper, we present a novel approach for generating guidance path for an AUV based on an Occupancy Grid Map (OGM) constructed from the measurements from a Mechanical Scanning Imaging Sonar (MSIS). The method consists of three components: MSIS data pre-processing, path generation and waypoint selection, to realize the autonomous iceberg wall-following behaviour. The presented method is generalized and can be utilized for other online wall following applications. The autonomy system is validated in a simulation environment where the AUV has successfully circumnavigated different icebergs at desired standoff distance of 20 meters and has produced an overall root-mean-square-error less than 4m.
Third Prize (Certificate and $1,000)
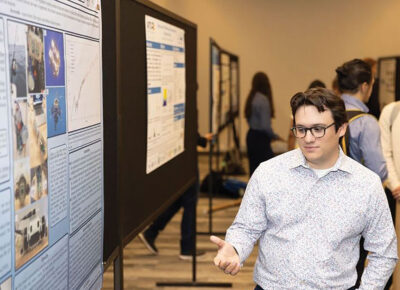 Jason Noel, University of Rhode Island, USA
Jason Noel, University of Rhode Island, USA
Advances in Fiber Optic Microtethered Systems for Deep-Sea Sensing and Exploration
Abstract—The field of deep-sea oceanographic research is commonly restricted to large research vessels and bulky underwater equipment requiring complex deployment schemes. Most equipment is in some way tethered to the deployment vessel, apart from fully autonomous systems. Typical tethers are heavily reinforced industrial grade cables, supplying power and communication to the subsea payloads. By utilizing fiber optic microtethers, specifically Fiber Optic Fishing Line (FOFL), small profile oceanographic sensor payloads and remote operated vehicles (ROVs) can be deployed from any size vessel of opportunity with minimal resources. The goal of developing these tethers further is to not replace, but operate alongside current reliable research methods, enabling deep-sea access to the ocean for a broader community of scientists and students. Here we present our improvements on FOFL, the Fiber Optic Reel System (FOReelS), and various sensing payloads designed to be deployable with FOFL on the FOReelS. We present performance data of the opto-mechanical properties of the microtether, alongside the successful development and deployment of three static modular payloads and two mobile ROVs in the field.
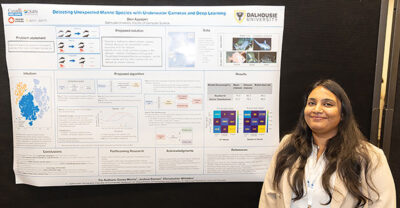 Devi Ayyagari, Dalhousie University, Canada
Devi Ayyagari, Dalhousie University, Canada
Detecting Unexpected Marine Species with Underwater Cameras and Deep Learning
Abstract—Integrating machine learning with audio and video monitoring for automating marine ecosystem monitoring is in its early stages but advancing rapidly. Typically, these models exhibit robust performance on marine classes and environments on which they have been trained; however, they often misclassify previously unseen marine classes with high confidence, erroneously assigning them to known categories. This study addresses the challenge of detecting previously unseen marine categories in underwater video data, while accurately classifying the examples of seen classes. We propose a system that leverages the features extracted from machine learning classifiers, and unseen marine classes from the publicly available OzFish dataset to accurately identify unobserved species in a low-lit, low-resolution underwater video dataset obtained by the Department of Fisheries and Oceans, Canada. We report accuracy scores of 83.0% and 85.2% for ViT and ResNet18 architectures, respectively, on an extensive test set of 46,641 images with both seen and unseen classes. This methodology marks a significant advancement toward the development of automated, scalable marine monitoring systems capable of adapting to varying species distributions and environmental changes.
Jesse Chen, Memorial University of Newfoundland, Canada
Quantification of the Effects of Preprocessing Filters on the Performance of GNSS-R Based Sea Ice Detection
Abstract—This study examines the influence of preprocessing techniques on the performance of Global Navigation Satellite System Reflectometry (GNSS-R) based sea ice detection. Preprocessing techniques evaluated in this study include precipitation screening and SNR thresholding. SNR thresholds are tested with -3 dB, 0 dB, +3 dB, and no threshold configurations. Precipitation screening is tested in three scenarios, containing all data, precipitation free data, and only precipitation contaminated data. Performance impact is determined by recording the sea ice detection accuracy, precision, and recall using the preprocessed datasets. The binary classification is conducted using two models: a histogram thresholding approach and a Bayesian approach. From these tests it was found that the inclusion of precipitation contaminated data did not result in an appreciable change to classification accuracy, precision, or recall. For SNR thresholding, classification accuracy peaks for the histogram thresholding approach when a SNR threshold of -3 dB or 0 dB is applied. For the Bayesian approach, peak accuracy is achieved with a -3 dB threshold. These results indicate that an SNR threshold of <0 dB results in superior classification accuracy and that precipitation may be considered negligible for sea ice detection purposes.
Davide Eccher, University of Trento, Italy
Physical Layer Authentication via Underwater Acoustic Multipath Channel Crafting
Abstract—With the increasing number of actors in the underwater environment and the development of new applications, such as large-scale monitoring and autonomous underwater vehicle control, securing underwater communications is becoming a primary necessity. Security was not prioritized in the past due to the constraints of underwater acoustic communications, which cannot sustain the overhead of typical cryptographic techniques. In this paper, we propose a method to authenticate a network device by exploiting the physical properties of the acoustic channel. In particular, our method hinges on the uniqueness and quasi-reciprocity of the channel, from which the authenticator (Alice) node can extract several parameters such as the number of multipath channel components, their delay and amplitude. These values are similar on both ends of a link between Alice and a legitimate transmitter (Bob), and can be used as a seed to craft a new artificial channel, that is then applied to transmissions from Bob to Alice. With this procedure, Alice can distinguish Bob from an impersonating attacker (Eve), given a previous message exchange history. Eve can try to bypass the protocol by estimating the channel parameters and by trying to replicate Bob’s signal by crafting a similar channel. In our tests, we observe that the estimation error for Eve, caused by her wrong channel estimates, becomes significant even for short distances betwen Eve and Bob. This error results in a discrepancy between the signal generated by Eve and the one expected by Alice, and reveals Eve as an attacker.
 Ella Ashford, Willamette University, USA
Ella Ashford, Willamette University, USA
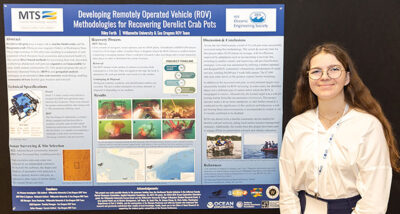
Developing Remotely Operated Vehicle (ROV) Methodologies for Recovering Derelict Crab Pots
Abstract—Derelict crab pots pose a major risk to marine biodiversity and the Dungeness crab (Metacarcinus magister) fishery in Washington State. These traps continue to fish after loss, resulting in a reduction of crab population which threatens local economies and ecosystem health. The current diver-based methods for recovering these lost, discarded, or otherwise abandoned crab pots are expensive and inaccessible for many small coastal communities. This project proposes the use of Remotely Operated Vehicles (ROVs) and geospatial analysis techniques as an alternative low-cost recovery methodology enabling community-driven derelict gear location and retrieval. A comprehensive methodology is developed inclusive of site selection, surveying, ROV-based crab pot recovery, and disposal. This methodology was tested in the coastal waters of Jefferson County, Washington State, where thirty crab pots were located and twenty approved to be removed. Additionally, the study outlines a model for community-based research that involves stakeholders, students, and invested residents in this marine resource management. It is demonstrated that the ROV-based method is an effective low-cost and community-driven way to recover derelict crab pots on a localized scale.
 Jonathan Glasspool, The University of Edinburgh, UK
Jonathan Glasspool, The University of Edinburgh, UK
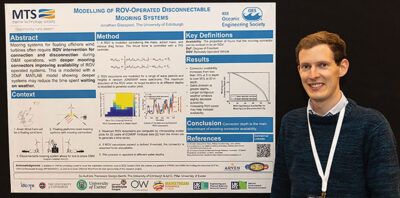
Modelling of ROV-Operated Disconnectable Mooring Systems in Wave Dominated Environments
Abstract—Floating offshore wind turbines (FOWTs) hold immense potential for unlocking previously inaccessible offshore wind resources, with recent advancements positioning the technology on the brink of commercial success. Central to the success of FOWT projects is the optimization of operations and maintenance (O&M) procedures, particularly concerning mooring system design and the utilization of Remotely Operated Vehicles (ROVs). This paper presents an analysis of mooring line disconnection activities using state-of-the-art ROV technology, focusing on the impact of mooring connector depth with the Arven Offshore Wind Farm serving as a case study. Utilizing a simplified two degree of freedom dynamic ROV model and hindcast metocean data, the study examines the station-keeping ability of an ROV subject to wave perturbations, evaluating the effect of depth on mooring connector operational availability. Results indicate that deeper mooring connector installations substantially enhance mooring connector availability from less than 10 % at 5 m depth to over 90 % at 20 m depth, thereby reducing weather- related delays and improving operational efficiency. Furthermore, a sensitivity analysis on ROV power highlights potential avenues for enhancing accessibility without necessitating mooring design modifications. These findings underscore the importance of integrating FOWT O&M strategies and installation considerations with mooring design at an early stage by accounting for realistic performance of ROV-operated tasks, ultimately contributing to the competitiveness and success in the offshore wind sector.
 Raymond Lam, The University of Edinburgh, UK
Raymond Lam, The University of Edinburgh, UK
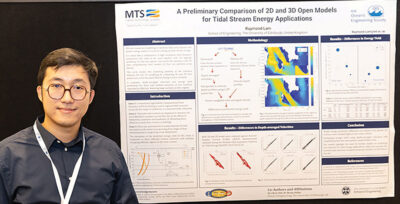
A preliminary comparison of 2D and 3D open models for tidal stream energy applications
Abstract—The tidal energy sector is transitioning from deploying single tidal turbines to large-scale arrays. Efficient and high-performance numerical modelling is crucial for determining the array layouts and accurately predicting the annual energy yield of tidal farms. For this, 2D and 3D regional-scale hydrodynamic models have been developed to assess wide-area tidal resources and model turbines over large areas and extended time periods. Although 2D models are more computationally efficient than 3D models for predicting regional flow, the differences in flow prediction performance between 2D and 3D regional-scale models requires further study for tidal energy applications. This study compares 2D and 3D flow predictions at the European Marine Energy Centre (EMEC) tidal energy test site in Scotland using the open software Telemac2D and Telemac3D. Both models are validated against Acoustic Doppler Current Profiler (ADCP) measurements obtained from a legacy UK tidal project (ReDAPT, 2010-2015). Our analysis evaluates the differences in depth-averaged velocities and energy yield predictions between the 2D and 3D model at two locations which are approximately 80 m apart but with large variation in flow regime observed in our previous studies. The evaluation is conducted on three different turbine scenarios with turbines occupying different regions in the water column. Our approach to 2D model evaluation uses a simplified power law assumption to convert depth-averaged velocities into velocity profiles and showed significant deviations in predicted energy yield compared to the 3D approach, which directly calculates power-weighted rotor averaged velocity taken from the velocity profiles. Model prediction differences are shown to be greater for turbine rotors located higher in the water column. The findings motivate further studies on modelling tool selection for tidal energy applications, taking into account machine type and levels of spatio-temporal variation at the side under study.
 Bangzhang Ma, The University of Tokyo, Japan
Bangzhang Ma, The University of Tokyo, Japan
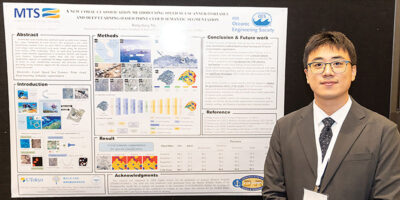
A new coral classification method using speed sea scanner-portable and deep learning-based point cloud semantic segmentation
Abstract—Traditional coral classification methods based on underwater images have many limitations in coral surveys, such as light attenuation, color distortion, and complex backgrounds, which affect their accuracy and reliability. To overcome these challenges, we propose a new coral classification method using Speed Sea Scanner-portable (SSS-P-P) and deep learning-based point cloud semantic segmentation. SSS-P can efficiently acquire high-resolution coral images, and we further build coral point clouds through Structure from Motion (SfM) technology. The point cloud semantic segmentation technology can accurately identify and classify corals and other seafloor features. Experimental results show that this method significantly outperforms traditional image segmentation techniques in coral classification accuracy and detection efficiency, providing strong technical support for the research and protection of coral ecosystems.
 Nicholas S. Occhiogrosso, Rutgers University, USA
Nicholas S. Occhiogrosso, Rutgers University, USA
Glider-observed seasonal and spatial distributions of zooplankton in the Mid-Atlantic Bight
Abstract—As secondary producers, zooplankton are essential in the energy flow within marine ecosystems, acting as a trophic link between photosynthetic primary producers and predatory organisms such as migratory fishes and marine mammals, including the critically endangered North Atlantic right whale (Eubalaena glacialis). However, the distribution of zooplankton, and drivers of those distributions, are not well studied in the highly productive Mid-Atlantic Bight coastal shelf ecosystem. This region exhibits strong variability that occurs over multiple time scales, from seasons to years to decades, and is located within the broader U.S. Northeast shelf that is rapidly warming and is susceptible to ongoing ocean acidification. Furthermore, offshore wind construction is scheduled to begin in New Jersey coastal shelf waters within the next few years, and potential impacts of offshore wind construction and operation on the oceanography and local ecology are currently unknown. Therefore, establishing a baseline dataset of oceanographic and ecological parameters is crucial to inform not only future studies focused on determining trends in zooplankton distribution but also the offshore wind planning process toward responsible development. Autonomous underwater vehicles (AUVs) called gliders can reliably collect high-resolution data over a wider depth range and often at a lower cost compared to vessel-based sampling. Active acoustic approaches using multi-frequency echosounders make it possible for AUVs to observe marine pelagic species’ distributions more directly, and when paired with other oceanographic and ecological sensors, provide insight into how seasonal changes in ocean conditions overlap with the distribution of fish, marine mammals, and their prey. In this study, gliders were used to collect a suite of oceanographic and ecological variables covering three distinct seasons (Spring 2023, Fall 2023, Winter 2024). Variables measured and included in this analysis were temperature, salinity, depth, chlorophyll-a, pH, colored dissolved organic matter, and zooplankton abundance and biomass.
 Jonathan D. Parsons, Dalhousie University, Canada
Jonathan D. Parsons, Dalhousie University, Canada
Onboard Near-Real-Time Detection of Harmful Algal Blooms using a Convolutional Neural Network and Multispectral Imagery from a Satellite in Low Earth Orbit
Abstract—Freshwater harmful algal blooms (HABs) pose significant ecological and public health risks worldwide. Detecting HABs soon after they form is critical to managing the damage they cause. While in-situ measurements are more accurate at detecting and measuring their toxicity levels, satellite imagery is more adept at capturing the spatial and temporal dynamics of these blooms over large geographic regions. Satellites can also more persistently monitor for HABs. In the past, empirical methods and machine learning methods have used multispectral satellite imagery to estimate HAB biomass. To build upon the current body of research, this paper investigates an approach to expedite HAB detection by utilizing a convolutional neural network (CNN) deployed onboard a CubeSat in low Earth orbit to detect HABs in near-real-time. The CNN is trained with multispectral imagery from the Sentinel-2 satellite constellation aggregated with in-situ cyanobacteria cell counts from the Seabass CAML dataset.
The results successfully demonstrated the capability of a CNN to detect cyanobacterial blooms using multispectral imagery. After classifying HAB predictions into 5 severity classes, the best performing model achieved a RMSE of 1.33 between HAB severity levels. Training the CNN on 30m GSD imagery with RGB and red edge (B05) bands achieved a RMSE of 1.83 between HAB severity levels, which was inadequate for detecting HABs in small inland water bodies. Improved performance was observed with 10m ground sample distance (GSD) band combinations. The best performing networks utilized all of Sentinel-2’s 10m and 20m spectral bands.
 Logan A. Paugh, United States Naval Academy, USA
Logan A. Paugh, United States Naval Academy, USA
Wave Focusing Induced by a Submerged Crescent-Shaped Plate in Combination with Headland Breakwaters
Abstract—As the rise in sea level becomes increasingly evident, various techniques to increase renewable energy production and reduce coastal erosion have become popular topics of study. In particular, interest has grown in varying geometries of submerged plates to focus waves and create reliable conditions for wave energy production. Through the principles of reflection, refraction, diffraction, and shoaling, these plates have been found to focus waves to specific locations. This study investigated wave focusing induced by a submerged crescent-shaped plate through a physical model experiment measuring wave transformation through a combined headland breakwater – focuser system. Through initial mapping of the wave height diffraction profile, we found that while wave attenuation occurred during early stages of propagation, constructive interference can be seen shoreward. By combining the concept of wave energy focusing and coastal protection methods such as headland breakwaters, experiments showed that the focal point of wave energy amplification was magnified due to the unique pattern of diffraction caused by the breakwaters. Through the combination of the two systems, wave energy converters (WECs) could be positioned in a more controlled environment while also helping to reduce shoreline erosion.
 Amy Phung, Massachusetts Institute of Technology, USA
Amy Phung, Massachusetts Institute of Technology, USA
Sonar-Aided Manipulation in Low-Visibility Conditions by Novice Users
Abstract—Underwater intervention tasks in the deep ocean are typically completed with remotely operated vehicles (ROVs) equipped with robotic manipulator arms, and rely on optical-based perception of the scene to guide the manipulation tasks. However, the performance of optical sensors is highly degraded in turbid water conditions, which can arise from a variety of causes. This work investigates the use of an imaging sonar and doppler velocity log mounted on the wrist of a manipulator for close-range scene mapping to aid in underwater intervention. We integrate this sonar-based perception method with a shared autonomy framework to facilitate safe intervention tasks by users without ROV piloting experience in turbid environments, and conduct experiments to validate our system.
 Simone Tani, University of Pisa, Italy
Simone Tani, University of Pisa, Italy
Preliminary online validation of a visual-acoustic-based framework for autonomous underwater structure inspections
Abstract—This paper presents the preliminary experimental validation of a visual-acoustic-based framework for the autonomous inspection of critical underwater infrastructures using Autonomous Underwater Vehicles (AUVs). The goal is to evaluate the feasibility of a strategy that enables an AUV to navigate relative to a target while maintaining a desired configuration. The proposed target relative navigation approach employs a minimal sensor suite – comprising a frontal stereo camera, a frontal acoustic range sensor, and an inertial unit – to provide information on the relative orientation and distance of the AUV from the inspection surface. This information is used to compute control actions that allow the vehicle to dynamically adjust its pose relative to the facility, adhering to specific mission requirements. The system was validated through an at-sea experimental campaign, during which a reference AUV performed relative navigation tests in front of a port dock. During the experiments, the target relative navigation solution was integrated into the robot software architecture to provide online feedback, thus enabling the AUV to maintain the desired distance and orientation relative to the dock. The results demonstrate the effectiveness and robustness of the proposed relative navigation approach, confirming its feasibility for enhancing the autonomous capabilities of underwater robots in marine infrastructure inspection tasks. Even under deliberate perturbations introduced via joystick by an operator, the AUV successfully maintained a reference distance from the harbor quay and regulated its orientation to zero, ensuring the frontal perception payload remained aligned with the target.
 Alexandru Umlauft, University of Rostock, Germany
Alexandru Umlauft, University of Rostock, Germany
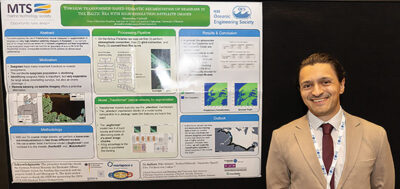
Towards transformer-based semantic segmentation of seagrass in the Baltic Sea with high-resolution satellite images
Abstract—Seagrass meadows are blue carbon hotpots. Mapping is an integral part to manage and understand meadows and their dynamics and thereby assist conservation and restoration efforts. Since traditional monitoring methods often become unviable at large spatial scales, satellite remote sensing has emerged as a supplementary tool. However, this approach is often constraint by the sensors’ spatial resolution and required training data. Here, we test a transformer-based approach to segment seagrass and compare it against a ResNet50 and MobileNetV3 on very high-resolution (VHR) Pléiades data (0.5 m spatial resolution). Our cross-validation approach demonstrates high performances of all methods, with transformers and CNN approaches being almost equal in performance (∼ 95 %), whereby our small dataset might have promoted overfitting. Large seagrass areas are well recognised, while very small patches of just a few pixels size are detected less accurately. However, the smallest patches detected by our models are only few meters in size, demonstrating that VHR data allows to resolve significantly more spatial details compared to data of publicly available medium-resolution sensors like Sentinel-2.
 Akash Vijayakumar, Indian Institute of Technology Madras, India
Akash Vijayakumar, Indian Institute of Technology Madras, India
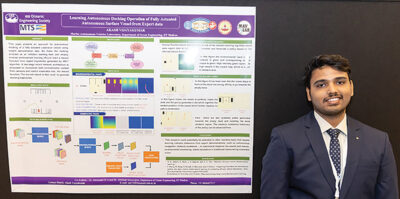
Learning Autonomous Docking Operation of Fully Actuated Autonomous Surface Vessel from Expert data
Abstract—This paper presents an approach for autonomous docking of a fully actuated autonomous surface vessel using expert demonstration data. We frame the docking problem as an imitation learning task and employ inverse reinforcement learning (IRL) to learn a reward function from expert trajectories. A two-stage neural network architecture is implemented to incorporate both environmental context from sensors and vehicle kinematics into the reward function. The learned reward is then used with a
motion planner to generate docking trajectories. Experiments in simulation demonstrate the effectiveness of this approach in producing human-like docking behaviors across different environmental configurations.
 Runfa Xing, Northwestern Polytechnical University, China
Runfa Xing, Northwestern Polytechnical University, China
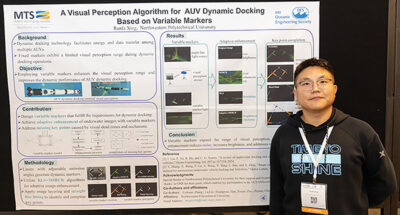
A Visual Perception Algorithm for AUV Dynamic Docking Based on Variable Markers
Abstract—Autonomous Underwater Vehicle (AUV), as a key instrument for ocean exploration, utilizes dynamic docking technology to enable energy replenishment and data transfer among multiple AUVs, thereby extending the mission radius. A critical step in AUV dynamic docking is terminal visual positioning and perception. However, current unchanged markers based on point light sources cannot meet the requirements for perception range and dynamic performance. This paper designs a variable marker based on a line light source, whose emission angle can adaptively change according to the docking distance, thus increasing the sensing range and reducing dead zones. Faced with the issues of reduced brightness and increased noise for variable markers underwater, adaptive image enhancement is achieved by combining algorithm Recursive Least Square (RLS) with the image enhancement algorithm Multi-Scale Retinex with Color Restoration (MSRCR). The straight-line fitting algorithm for layer segmentation, combined with line light source information, effectively improves the success rate of visual perception and addresses the issue of key point loss in motion. This paper conducts visual recognition experiments on variable visual markers underwater, verifying the feasibility and accuracy of the proposed visual perception algorithm.
 Zhao Fan, The University of Tokyo, Japan
Zhao Fan, The University of Tokyo, Japan
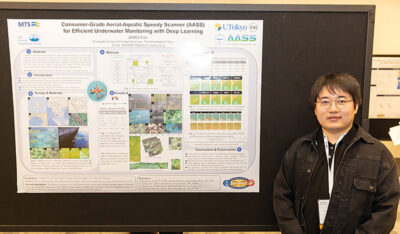
Consumer-Grade Aerial-Aquatic Speedy Scanner (AASS) for Efficient Underwater Monitoring with Deep Learning
Abstract—Traditional marine monitoring techniques, such as line intercept transects, are often inefficient. While contemporary studies utilize autonomous underwater vehicles (AUVs) and the novel Portable Speedy Sea Scanner (P-SSS) to enhance marine monitoring, their widespread adoption is hindered by high costs and labor-intensive operations, with the data quality often failing to justify the investment. This study introduces a novel self-designed amphibious unmanned aerial vehicle (AASS), integrated with deep learning technology, which combines aerial and aquatic imaging capabilities. It surpasses traditional towed underwater survey tools and AUVs in ecological monitoring effectiveness. The research presents the AASS, enhanced with Super-Resolution Reconstruction (SRR) and an improved YOLOv8 detection network. The AASS system significantly improves data acquisition efficiency, capturing high-resolution images that precisely identify and categorize underwater targets. The SRR technique addresses issues like motion blur and low resolution, enhancing the YOLOv8 model’s detection accuracy. Notably, the RCAN model achieved the highest mean average precision (mAP) of 78.6% for detecting reconstructed underwater images, with a x4 magnification in image quality showing superior mAP compared to the Bicubic method. These results affirm the efficacy of the proposed method in enhancing underwater ecological monitoring.
 Xiaoteng Zhou, The University of Tokyo, Japan
Xiaoteng Zhou, The University of Tokyo, Japan
Acoustic Camera-Based Automatic Abundance Estimation Algorithm for Marine Plastic Debris
Abstract—The debris emitted by human society flows into the ocean in large quantities, among which plastic debris has the most serious impact, causing irreversible harm to ecosystems. Effectively perceiving marine plastic debris and estimating abundance is crucial for making cleanup solutions. However, current abundance estimations of debris mainly focus on the water surface, as optical and primary satellite sensors cannot work well in low-visibility underwater environments. Many investigations have shown that there is a lot of plastic debris below the ocean surface and even on the seabed, thus requiring the development of debris abundance estimation techniques applicable to various underwater visibility conditions. This study proposes an abundance estimation algorithm for marine plastic debris based on machine vision and the high-resolution acoustic camera, also known as forward-looking sonar, which can be used in low-visibility marine environments. The proposed approach was validated in a circulating water tank experiment and the results show that our proposal could effectively estimate debris abundance, potentially replacing time-consuming and labor-intensive manual investigation.
 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.